近日,新加坡國立大學工程師團隊開發新型混合機器人系統,通過模擬人類抓取,使機器人能夠安全地與各種形狀、尺寸和硬度的精致物品互動,進而徹底改變傳統的拾取和放置任務,並將大力推動各行業自動化進程。
抓手系統的突破與創新
受到人手自然靈巧的啓發,新加坡國立大學(NUS)的工程師團隊創造了一個可重新配置的混合機器人系統,能夠抓取各種小型、柔軟、精致或是大型、笨重的物體。
這項技術預計將影響一系列行業,包括食品組裝、垂直農業和快速消費品包裝,這些行業在未來幾年將逐步實現更多的自動化操作。

新型機器人抓手,來源:NUS
在NUS生物醫學工程系和NUS先進機器人中心的Raye Yeow副教授的領導下,這種混合機器人抓手使用了柔軟、靈活的3D打印手指,並帶有可重新配置的抓手底座。
在該團隊的初創公司RoPlus(RO+)的帶領下,機器人的創新成果現在正被推向商業夥伴,該團隊由NUS研究人員Low Jin Huat、Khin Phone May、Chen Chao-Yu和本科生Han Qian Qian組成。

(左起)Han Qian Qian, Khin Phone May,
Assoc Prof Raye Yeow, Low Jin Huat,
Chen Chao-Yu,來源:NUS
Yeow副教授表示:“物體的形狀、質地、重量和大小都會影響我們的握持方式。這是許多行業仍然嚴重依賴人力來包裝和處理易碎物品的主要原因之一。我們的混合機器人抓手技術通過提供先進的功能,使機器人能夠安全地與各種形狀、尺寸和硬度的精致物品互動,就像人類的手一樣,徹底改變了傳統的拾取和放置任務。”
仿生抓取解決方案
抓取是人類最常見和最自然的任務之一,但對于機器人來說,就沒有那麽直觀了。爲了實現類似人類的抓取能力,機器人需要計算機視覺和深度學習來檢測面前的物體類型以及它們的方向。然後,抓取器可以自動決定如何最好地抓取和放置物體,以盡量減少人類密集幹預的必要性。
爲了開發與人類雙手一樣靈巧的機器人抓手,NUS團隊提出了混合機器人抓手,由三到四個柔軟的手指組成,可以根據需要進行重新配置。
手指由空氣驅動,並配備了一個可調節硬度的新穎鎖定機制。NUS團隊已經開發了三種類型的混合機器人抓手系統——幾乎就像三種不同的手,在不同的環境下都很有用。
3D打印生産機器人抓手,來源:NUS
第一種是GourmetGrip,它適用于最細小的任務,如處理精致的一口大小的零食,或像豆腐這樣容易損壞的食物,並將它們裝入外賣盒。這種軟手模式是可重新配置的,因此它可以適應不同的抓握姿勢,以及各種空間限制。
當安裝在工業機器人手臂上時,GourmetGrip可以實現以與人類相當的速度取放食品,而且可以24小時以一致的速度完成這些任務。與市面上其他抓手器相比,GourmetGrip系統的抓握效率提高了23%左右,能夠更快、更精確地抓取物品。
到目前爲止,GourmetGrip系統能夠有效地抓取50多種不同的食品,如布丁、切片蛋糕、蔬菜和水果。
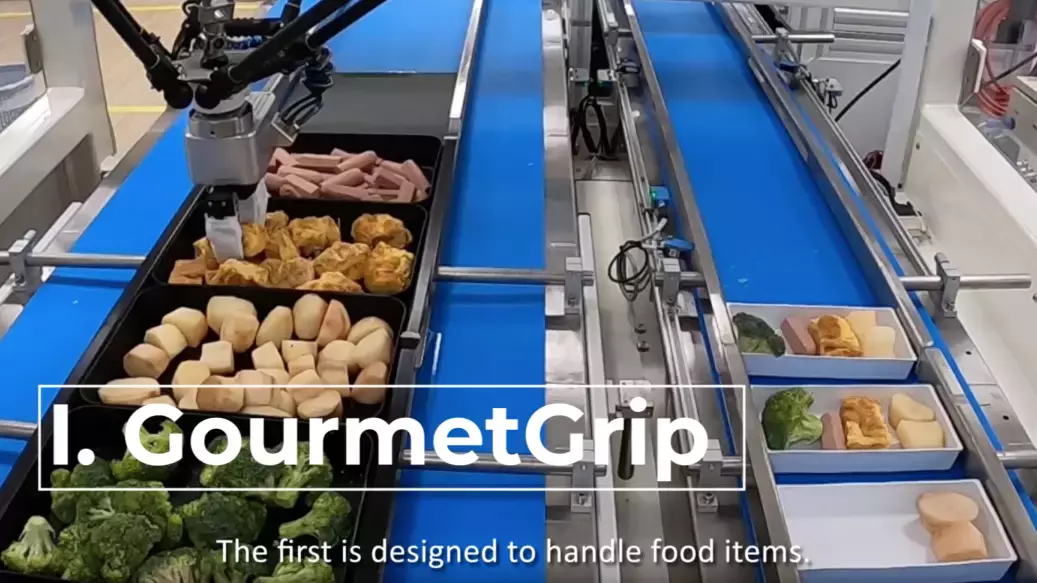
GourmetGrip系統,來源:NUS
第二種抓手被稱爲UnisoGrip,即通用軟抓手,是該團隊更廣泛應用的解決方案。它是爲處理裝配線上的包裝貨物而設計的,這些貨物通常是在裝運和運輸的最後階段被放入箱子的。
它的抓握範圍大大擴大,並擁有柔軟的可旋轉的抓握手指,以實現精細的抓握,以及一個真空吸盤,使它能夠操縱位置更尴尬的物體,如手提袋的角落。

UnisoGrip系統,來源:NUS
不同于GourmetGrip的握把範圍類似于人類的手,UnisoGrip的抓取範圍明顯更大,可以處理寬達30厘米、重達3公斤的物品,因此它在處理各種消費品時用途更廣。
它的抓取效率也比市面上其他的抓取器高20%。迄今爲止,UnisoGrip抓取系統可以抓取30多種不同類型的消費品,如瓶裝飲料、咖啡粉包、可補充的洗滌劑包,等等。
第三種抓取器是完全可定制的,基于GourmetGrip,UnisoGrip平台的基礎上,以適應客戶的具體需求和空間限制。
這種方法提供了各種各樣的抓取選擇,可以處理不同形狀、大小和包裝材料的物體。NUS團隊的可定制技術已應用于新加坡米粉制造商People Bee Hoon Factory,用于優化將米粉包放入紙箱的包裝過程。

可定制系統,來源:NUS
在談到該公司決定投資NUS研發的這項新技術時,People Bee Hoon Factory董事Desmond Goh先生說:“我們現有的大部分員工都是成熟的工人,因此我們尋求利用新技術,以減輕現有員工的工作量,同時提高他們的生産力。我們選擇這項技術是因爲它能夠滿足我們的目的,並爲我們所需的不同工作部署提供靈活性。”
將NUS的創新推向市場
NUS團隊的初創公司RO+爲商業夥伴提供部署機器人抓手系統的不同選擇——它們可以與機械臂捆綁在一起,也可以單獨購買,因爲抓手可以很容易地安裝到自己已擁有的商業機械臂上。
RO+還計劃提供一種四合一的解決方案,包括抓取器、機械臂、計算機視覺模塊和傳送系統。該團隊還正在通過機器學習來提高抓握器的智能,該系統可以通過在線圖書館進行訓練,以不斷學習和優化抓取新物品的能力。
RO+得到了NUS研究生研究創新計劃(GRIP)的支持,該計劃爲該大學的員工和研究人員創建的初創企業提供孵化資源。抓取系統的相關研究也得到了國家機器人計劃和科學、技術和研究機構的支持。
