(報告出品方:招商證券)
一、工業機器人——自動化的明珠
1、工業機器人,智能制造的代言人
工業機器人是面向工業領域的多關節機械手或多自由度的機器裝置,主要用于代替人工從事柔性生産環節,是靠自身 動力和控制能力實現各種功能的一種機器。

目前工業機器人已有較完整的産業鏈,大致可分爲原材料、核心零部件、本體制造、系統集成服務等環節: 最上遊原材料:主要包括鋼材、鑄鐵、鋁合金及少量塑料制品和各種電子元器件。 核心零部件:包括控制系統、伺服電機、精密減速器、及傳感器等。 工業機器人本體制造:機器人的結構和功能設計及實現。 系統集成:按照客戶需求,進行産線的設計和組裝。
控制器、伺服電機以及減速器是構成工業機器人的三大核心零部件。三大核心零部件的性能、穩定性很大程度上決定 了工業機器人的性能與穩定性。由于核心零部件的生産技術壁壘較高,大多關鍵技術被少數公司壟斷,使得機器人生産商在采購時議價能力不足,采購價格較高。 控制器是工業機器人的“大腦”。控制器負責將動作指令發布和傳遞給執行機構。由硬件和軟件兩部分構成:硬件就 是工業控制板卡,包括一些主控單元、信號處理部分等電路;軟件主要是控制算法、二次開發等。 伺服系統是工業機器人的“動力源”。伺服系統通常由伺服電機和伺服驅動器組成,主要負責將接收到的電壓信號轉 變爲轉矩與轉速以驅動控制對象。 減速器是工業機器人的“關節”。減速器是核心零部件中技術壁壘最高的一環,也是工業機器人中成本占比最大的零 部件,主要起到匹配轉速與傳遞轉矩的作用。減速器分爲諧波齒輪減速器、擺線針輪行星減速器、RV 減速器、精密 行星減速器和濾波齒輪減速器,其中工業機器人主要使用的是諧波減速器與 RV 減速器。

工業機器人可以按機械結構、坐標形式以及程序輸入方式等進行分類。根據坐標形式的不同,工業機器人可以分爲直 角坐標型、圓柱坐標型、球坐標型、多關節型和平面關節型等。其中,多關節型(六軸工業機器人)與平面關節型(SCARA 型機器人)最爲常見,被廣泛的應用在了汽車、3C 行業中。
2、工業機器人于美國發源,于日本興盛
工業機器人誕生于美國,興盛于日本。1959 年,發明家德沃爾與約瑟夫·英格伯格聯手制造出第一台工業機器人, 它結構和功能都十分簡單,只能進行簡單的重物搬運。但由于失業率高、工會阻撓等原因,工業機器人並未在美國生 根發芽。日本由于其各方面的優勢,接過了美國的接力棒,成爲了工業機器人産業的引領者,目前日本已經形成了從 上遊核心零部件到中遊本體制造再到下遊系統集成的完整産業鏈。其中,最有名的公司莫過于“工業機器人四大家族” 中的發那科與安川,以及減速器龍頭哈默納科以及納博特斯克。
中國工業機器人産業起步較晚。雖然早在 20 世紀 70 年代,科技部就將工業機器人列入了科技攻關計劃,原機械工業 部也牽頭組織了點焊、弧焊、搬運等工業機器人相關領域的攻關,但由于當時國內人口紅利正盛,市場需求不足,工 業機器人産業的發展出現了較長時間的停滯。等到 2010 年以後,市場重新將目光投向該領域時,日德等制造強國已 經建立起了完善的産業鏈,在市場競爭中占據了先發優勢。國內工業機器人無論是本體還是核心零部件,都與國外巨 頭存在著巨大的差距。2010 年以後,國內的工業機器人産業開始全面發展。當前,國內的工業機器人仍以本體制造 的組裝爲主,零部件尚需要大量進口,且産品主要定位在中低端市場。
3、協作機器人、特種機器人、人形機器人
協作機器人:更安全,更適應未來商用、家用空間。工業機器人隨著技術進步逐步小型化,分化出具備安全、柔性、 與人協作特點的協作機器人。機器人下遊行業中,汽車是 20kg 以上應用場景,家電、3C 在 4kg 左右,半導體行業在 12kg 左右。在輕負載工作環境下,安全性得到保障,可實現機器人與人在同一空間內進行協同工作的機器人——協 作機器人應運而生。
協作機器人與工業機器人最大的區別在于安全性,當觸碰障礙物時會自動停下。現多家公司正在開發環境感應技術, 已有試用機型可實現碰撞前停止運行。其他區別包括:應用場景不同,工業機器人精度更高,末端速度在 7.8m/s,負 載大;協作機器人注重靈活性,對編程要求低,可拖拽示教(精度更低)。
特種機器人:針對特殊高危場景的解決方案。特種機器人指除工業機器人、公共服務機器人和個人服務機器人外的機 器人,主要應用于專業領域,一般由經過專門培訓的人員操作或使用,輔助和/或代替人執行任務。2021 年特種機器 人銷售額占全球機器人市場的 28.17%,占國內機器人市場的 7.93%。 特種機器人分類:(1)根據行業分類:農業機器人、電力機器人、建築機器人、物流機器人、醫用機器人、護理機器 人、康複機器人、安防與救援機器人、軍用機器人、核工業機器人、礦業機器人、石油化工機器人、市政工程機器人 和其他行業機器人。(2)根據功能分類:采掘、安裝、檢測、維護、維修、巡檢、偵察、排爆、搜救、輸送、診斷、 治療、康複、清潔等。(3)根據使用的空間分類:地面機器人、地下機器人、水面機器人、水下機器人、空中機器人、 空間機器人和其他機器人。(4)根據運動方式分類:輪式機器人、履帶式機器人、足腿式機器人、蠕動式機器人、飛 行式機器人、潛遊式機器人、固定式機器人、噴射式機器人、穿戴式機器人、複合式機器人和其他運動方式機器人。
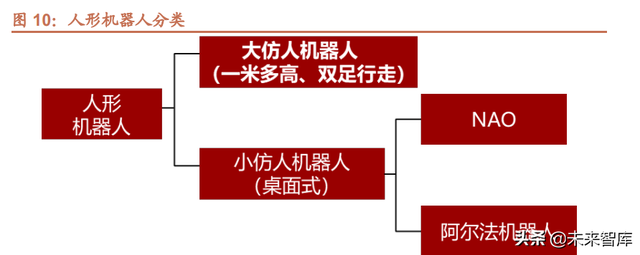
人型機器人是旨在模仿人類外觀和行爲的機器人,被譽爲機器人皇冠上的明珠。人形機器人的挑戰難度是業界公認最 高的,對基礎三大要素包括規劃、控制和感測所對應的裝置要求非常高。特斯拉首席執行官馬斯克稱 Tesla Bot 有望 在 2023 年投入生産,其將用來填補勞動力缺口。 人形機器人目前主流的技術路線包括以下幾種:(1)以本田 Asimo 爲代表的傳統電控+控制方法。該方法在控制方面 通過力控+位置控制實現,使用傳統電機驅動和傳統的機械結構,本質類似于意大利 IIT 的 iRonCub 與力控的結合。 (2)以波士頓動力 Altas 爲代表的液壓驅動+控制方法。液壓驅動可以實現仿人機器人運動的極致,目前在運動能力 上首屈一指。(3)以 Agility 的 Cassie 爲代表,重心上移的新方式,腿很細,上半身較大,該方式可以節約功耗。
人形機器人供應鏈:(1)齒輪:小仿人可選傳統齒輪、精密性齒輪、諧波齒輪;(2)驅動器(電機):國産電機與海 外電機相差不大,得益于軍工電機轉民用;(3)傳感器:用于感知設備驅動器內部的轉速、位置的傳感器,目前以進 口爲主,技術被老牌海外企業掌握;(4)芯片:均以海外供應商爲主,小仿人可以用國産主控芯片。主控芯片:寫入 電機、舵機、速度驅動器算法的芯片。常用的包括英特爾的 x86 系列芯片(有部分集成控制無法使用 GPU,因而仍 在使用傳統的 CPU)、基于 AI 計算的 AI 處理芯片,如英偉達芯片、高通的強 AI 算力處理器。國産選擇較少;(5)傳 感器:國産化率較高,其中超聲傳感器、紅外傳感器(障礙物檢測)、視覺傳感器(雙目、多目)等基本可以實現國産 化。力矩傳感器以海外爲主。
二、安裝量已居第一,自主品牌正迎頭趕上
1、我國成爲機器人生産消費大國,21 年全球市場超千億
2011~2020 工業機器人安裝量保持 10%以上年增速,勞動力替代及制造業升級雙邏輯加持,長期向好趨勢不變。其 中中國十年複合增速超 25%,2013 年中國超過日本成爲世界最大的機器人使用國,近 20 年來安裝量占比從 0%提升 至 44%。以我國機器人單台價格中位數 15 萬元估計,全球 2021 年市場規模爲 1200 億元。2020 年疫情得到控制後, 海內外制造業需求爆發,我國機器人行業進入爲期 2 年的增長期,月均産量越過 3 萬台大關。僅在 2022 年 4 月後, 因長三角疫情而陷入負增長。
我國機器人密度穩步提升,但與發達國家仍有差距。根據 IFR 數據統計,2019 年全球工業機器人平均保有量已達到 113 台/萬人,其中新加坡最高,已達到 918 台/萬人,日本 364 台/萬人,中國 187 台/萬人。從每萬制造人員使用量 上來看,達到日本水平還有 1X 空間。
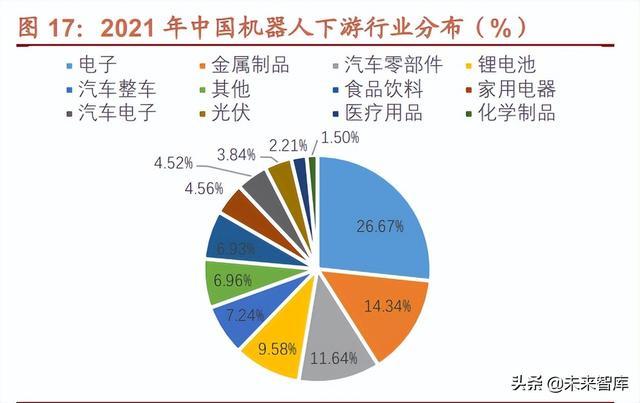
機器人下遊應用仍以電子、汽車爲主,锂電、倉儲增速居前。絕對數值上,工業機器人早期主要應用于汽車制造業的 焊接、噴塗線,後小型工業機器人(含 SCARA、DELTA)在 3C 行業因成本優勢快速替代人力的重複勞動。近年受 “雙碳政策驅動”,锂電池板塊快速擴産,锂電池生産工藝中疊片、焊接、封裝等工序,因一致性需求使用機器人較 多,後道檢測、組裝和 PACK 主要依賴機器人進行大負載抓取、搬運提升自動化水平。倉儲環節則主要由 AGV、中 大型堆垛機器人組成。
我國工業機器人進出口均價差距大,高端機型更加明顯。目前因爲國産機器人核心零部件(控制器、伺服系統、減速 器等)精度及一致性落後于進口品牌,單個細節的誤差最終累積到整體誤差上使得國産品牌難以與外資機器人競爭, 只能在價格上讓步。22Q1 噴塗機器人進出口差價達 4.1 萬美元,多功能機器人進出口差價達 4500 美元。
2、四大家族鎖定高端市場,國産雙星率先突圍
“四大家族”全球市占率超 50%,國內市占率超 40%,自主品牌埃斯頓及彙川技術各占 4%。“四大家族”承襲原有 機床、伺服系統、焊接設備技術優勢,機器人領域繼續占據鳌頭。國內品牌埃斯頓、彙川技術快速成長,在 2021 年 銷量均突破 1 萬台,進入中國工業機器人銷量前十。前者以 6 關節機器人爲主、後者以 SCARA 機器人爲主,現均向 多種負載、全産品系列方向邁進,有望成爲真正替代“四大家族”的國産機器人品牌。
實際應用積累 know-how 是艱難的一關。機器人行業自身周期成長雙屬性,周期屬性與通用自動化及中國自身信用 周期相關,而成長性主要來自于制造業升級及勞動替代。後疫情時代,下遊各細分行業龍頭公司不會因爲短期的經濟 周期波動而暫緩內部的産線升級,同樣以甯德時代爲首的锂電池廠商擴産方興未艾,現“四大家族”機器人訂單已排 産至 2023 年中後。“四大家族”機器人供不應求給國産龍頭品牌提供了切入高端下遊應用場景的機會。過去國産機 器人品牌的應用場景具有單一化、長尾化的特點,缺乏長時間完整生産線自動化的 know-how 積累,在高端應用場景 往往難以滿足全方位的需求,因而只能以工作站的形式在特點工位進行人力替代。以锂電池行業爲例,其既涉及焊接, 又涉及小工件高速節拍搬運,也涉及大工件重負載搬運,需要全品類焊接機器人、堆垛機器人、SCARA 機器人的配 套。以電池盒焊接工序爲例,鋁合金焊接需使用攪拌摩擦焊,需要重型負載機器人搭載徑軸攪拌器,施加強壓力配合 高溫融化材料再進行摩擦焊,在自身圓周運動的同時保持整體路徑的直線。
相似的成長路徑,埃斯頓承襲控制器、彙川技術承襲伺服系統,快速響應能力助力國産替代。埃斯頓在機器人成長之 路上與發那科相近,其擁有 20 年折彎機床數控系統開發經驗,15 年折彎機床伺服系統,後收購 Trio 和 Cloos 完善其 控制系統及焊接相關技術。彙川技術具備變頻器、伺服系統、編碼器、PLC&HMI、視覺系統等産品矩陣,可全方位理 解運動控制,並具有高度一致性和穩定性。在具備機器人核心零部件自主生産能力外,埃斯頓與彙川技術在配合客戶 階段,可支持人員數量及反應速度上較外資品牌優勢大。國産品牌正不斷豐富自身技術及産品系列,從長尾的非標場 景逐步往大批量的標准化場景應用,替代外資品牌。(報告來源:未來智庫)
三、控制器、伺服電機、減速機,三核心零部件決定機器人性能
1、三核心零部件占據成本 70%
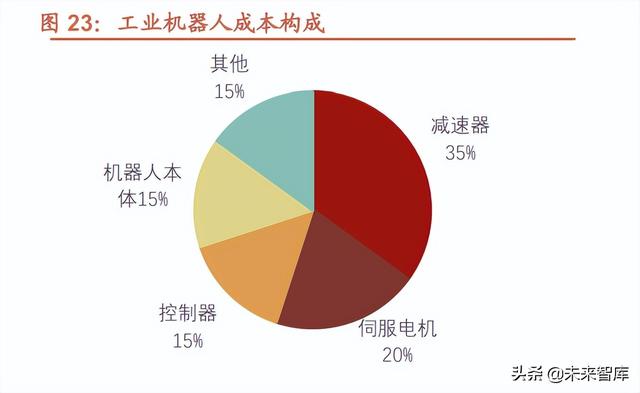
工業機器人的核心零部件包括控制器、伺服系統、減速器,決定了工業機器人的精度、穩定性、負荷能力等重要性能 指標。核心零部件是産業鏈中壁壘最高的環節,占機器人成本的 70%。控制器是工業機器人的“大腦”,一般占總成 本的 15%左右;伺服系統是工業機器人的“動力源”,一般占總成本的 20%左右。減速器是工業機器人的“關節”, 減 速器一般占總成本的 35%左右。
2、控制器:工業機器人的大腦
控制系統是決定機器人性能的關鍵要素,接收來自其他各組元的信號、根據已編程的系統進行處理後,向各組元發出 指令,從而控制各組元的運行,它是工業機器人實現特定功能的中樞單元。
目前常用的控制系統從結構上分爲三類:以單片機爲核心的控制系統,以可編程控制器(PLC)爲核心的控制系統,以及基于工業個人計算(IPC)+運動控制器的機器人控制系統。其中 IPC+運動控制器的控制系統憑借運行穩定、通 用性強、抗幹擾性能力強等優勢,正在逐步成爲工業機器人控制系統的主流。
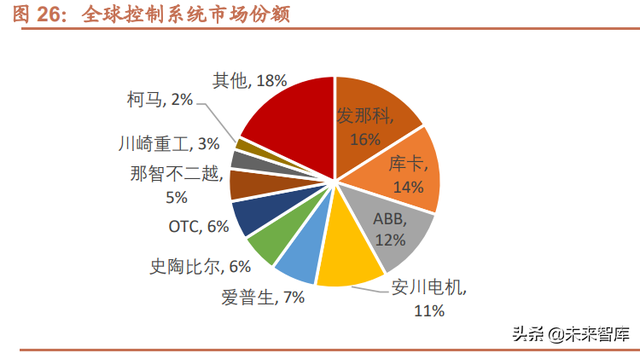
核心技術,本體廠家自産居多:工業機器人的控制系統主要由硬件和軟件兩部分構成,硬件即工業控制板卡,軟件主 要是控制算法、二次開發等。控制系統的表現是一家工業機器人廠商設計理念的集中體現,成熟的機器人廠商一般自 行開發控制器和伺服系統,從而保證機器人的穩定性和技術體系。因而全球控制系統的市場份額與工業機器人本體情 況接近。
智能化程度越來越高,是未來工業機器人發展的必然趨勢,未來各本體制造商之間的差異化也將越來越顯著,這種差 異化最主要體現在控制系統上。隨著國內廠商技術的逐步積累進步,目前控制系統與國外産品的差距在逐步縮小。國 內知名的工業機器人生廠商均自主研發了自家的控制系統,包括埃斯頓、華中數控、新時達、廣州數控、彙川技術等 公司,也誕生了一批專業的控制系統服務商如固高科技、英威騰、卡諾普等。
3、伺服系統:工業機器人的動力來源
伺服系統是工業機器人主要的動力來源,主要由伺服電機、伺服驅動器、編碼器三部分組成。伺服含義爲“跟隨”,指 按照指令信號做出位置、速度或轉矩的跟隨控制。2021 年我國伺服系統市場規模約 189 億元,處于快速發展狀態。
伺服電機:每個關節會被布置一個電機。目前小型交流伺服電機使用較多,也有部分采用直流電機。直流電機的優點 是功率更大,但交流電機結構更加簡單,後期養護和維修更方便,因此越來越受到歡迎。 伺服驅動:伺服驅動器主要的作用包括接受編碼器信號進行修正調整,然後根據指令發出相應控制電流。驅動器與伺 服電機爲閉環控制系統,驅動器由編碼器送回數據進行控制修正工作。伺服驅動器包括位置控制單元、速度控制單元 和驅動單元三部分構成。 編碼器:爲了達到閉環控制,在電機輸出軸同軸裝上編碼器,電機與編碼器同步旋轉,電機轉一圈編碼器也轉一圈, 轉動的同時將編碼信號送回驅動器,驅動器根據編碼信號判斷伺服電機的轉向、轉速、位置是否正確,據此調整驅動 器輸出電源頻率及電流大小。

伺服系統日系主導,歐美其次,國産追隨。我國工業機器人用伺服系統仍以日系爲主導,但國産突破已小有成就,彙 川、禾川、埃斯頓合計共占 18.5%。
伺服電機市場規模持續增長,國産品牌份額加速提升:目前外資品牌占據我國伺服電機市場 65%的份額,主要爲日本 和歐美品牌。過去外資品牌長期主導市場,近年隨著我國工業自動化加速,一批國産品牌迅速崛起。2021 年上半年 國産品牌彙川技術首次市場份額占比排名第一,市占率達 15.9%。中國台灣台達和德國西門子在光學儀器領域的占有 率也較高。
我國伺服電機與日系和歐美品牌仍然存在差距,主要表現爲:大功率産品缺乏、小型化不夠、信號接插件不穩定、缺 乏高精度的編碼器,這些也是國內伺服系統未來要攻克的主要方向。
4、減速器:減速增矩,保證精度
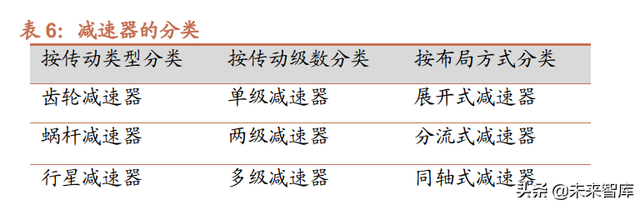
減速器是工業機器人的“關節”,主要起到匹配轉速與傳遞轉矩的作用。減速器是核心零部件中技術壁壘最高的一環, 主要起到匹配轉速與傳遞轉矩的作用。減速器的分類方式有多種:按照傳動類型,減速器可分爲齒輪減速器、蝸杆減 速器、行星減速器、擺針減速器等;按照傳動級數,可分爲單級減速器、兩級減速器、多級減速器;按照布局方式, 可分爲展開式減速器、分流式減速器、同軸式減速器等。
減速增距,協調轉速、扭矩,保障精度。工業機器人依靠伺服電機驅動,但伺服電機轉速快、扭矩小與工業機器人關 節所需要的轉速慢、扭矩大矛盾。伺服電機本身可以實現調速,但低頻運轉下容易發熱和出現低頻振動,無法保證工 業機器人高精度工作。減速器可使伺服電機在一個合適的速度下運轉,並精確地將轉速降至工業機器人各部位需要的 速度,提高機械體剛性的同時輸出更大的力矩,提高重複定位精度,執行重複、精准的動作。
諧波減速器工作原理:將波發生器裝入柔輪時,柔輪會隨波發生器形狀變形爲橢圓。當波發生器旋轉時,柔輪的開口 端會産生徑向變形,因爲柔輪此時爲橢圓形,且柔輪齒數少于鋼輪齒數(通常爲 2 齒),柔輪只會在兩個長直徑處齧 合。隨著波發生器的旋轉,柔輪與鋼輪齧合的位置會發生移動,由于柔輪和鋼輪之間的齒數差異,波發生器每旋轉 180 度,柔輪和鋼輪的齧合位置將改變一個齒。減速比計算公式爲:(柔輪齒數-鋼輪齒數)/柔輪齒數,其中結果爲負表明 是反向運動,爲正表明同向運動。例如,一諧波減速器柔輪爲 100 齒,鋼輪爲 102 齒,則該減速器減速比爲-1/50, 即輸入端波發生器和電機轉 50 周,柔輪輸出端反向轉 1 周。
RV 減速器工作原理:在外殼的內環圈內裝有圓柱形的滾針(Pin),RV 齒輪的偏心運動引起滾針與擺線形 RV 輪齒的 齧合和脫離,産生多組 RV 輪齒與滾針同時齧合,提高負載能力。由于 RV 齒數比滾針少1個數目,因此當偏心軸旋 轉一周時,如果固定外殼(Case),則 RV 齒輪與輸入軸同向轉1個齒的角度。輸出端可以是傳動軸(Shaft)或外殼。 如果外殼固定,則傳動軸爲輸出,輸出爲同方向。如果傳動軸固定,外殼爲輸出,輸出的方向恰好相反。更換固定和 輸出部件,可以得到不同的傳動比。 諧波減速器適合小臂,RV 減速器適合大臂,互爲補充。諧波減速器具有單級傳動比大、體積小、質量小、運動精度 高並能在密閉空間和介質輻射的工況下正常工作的優點,因此在機器人小臂、腕部、手部等部件具有較強優勢。RV 減 速器傳動比範圍大、精度較爲穩定、疲勞強度較高,並具有更高的剛性和扭矩承載能力,在機器人大臂、機座等重負載部位擁有優勢。目前兩者適用領域不同,還不能互相取代。一般情況下,一套六軸多關節機器人需要 4 套 RV 減速 器和 2 套諧波減速器;一套 SCARA 機器人包含 4 套諧波減速器;一套直角坐標機器人需要 3 套 RV 減速器和 1 套 諧波減速器;DELTA 機器人的電機安裝在固定基座上,需要 1 套諧波減速器。
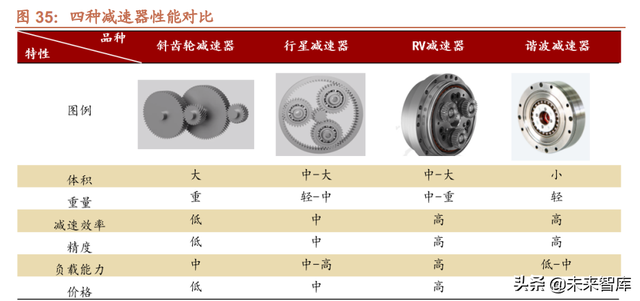
相較于其他三種減速器,諧波減速器體積最小、重量最輕,減速比最高。與傳統斜齒輪減速器和行星齒輪減速器相比, 在輸出力矩相同時,諧波減速器的體積可減少 2/3,重量可減輕 1/2;在同等空間內,諧波減速器最高可以提升減速比 近 30 倍。因此在爲設備選擇減速器時,優先考慮精度,再依據所需的負載能力、空間、成本等篩選。以機器人爲例, 機器人有嚴格的定位及重複定位精度要求,幾乎只使用 RV 和諧波減速器。常見的工業機器人在基座及大臂上使用 RV 減速器(容許力矩負載可達 8000N·m),在中小臂上使用諧波減速器(容許力矩負載在 1500N·m 以內);輕負載 (20kg 以下)的機器人全部使用諧波減速器。目前 RV 減速器和諧波減速器適用範圍不同,還不能互相取代。
全球超過 85%的減速器市場份額被日本廠商占據:全球工業機器人減速器的市場高度集中,其中日本納博特斯克在 RV 減速器領域處壟斷地位,日本哈默納科則在諧波減速器領域處壟斷地位,兩家合計占全球市場的 75%左右。由于 其極高的技術壁壘,工業機器人本體制造環節對減速器環節議價能力很弱。
四、機器人行業發展的宏觀背景
1、“機器人王國”——日本
日本擁有完整的工業機器人産業鏈。日本擁有從核心零部件,到本體,到系統集成的完整産業鏈,並且在每個環節都 處于世界領先的地位。擁有多家世界知名的機器人公司,例如,哈默納科與納博特斯克是減速器裏的絕對龍頭企業, 兩者分別建立了諧波和 RV 的行業使用標准,在機器人領域,兩者合計市占率超 75%,其中納博特斯克的市占率超過 60%,哈默納科市占率爲 15%左右。發那科是數控系統領域的世界龍頭,和伺服電機龍頭公司安川電機一起占據工業 機器人“四大家族”中的兩席。 掌握著最多的工業機器人技術專利。日本在工業機器人的關鍵技術上處于絕對領先地位。除了塗裝軌迹規劃技術等若 幹小方面,中國可以與日本分庭抗禮外,其他所有技術基本都被日本牢牢把控,其中諧波減速器、RV 減速器、電焊 鉗以及焊縫追蹤四個領域超過 70%的專利都屬于日本。
日本機器人從模仿起步,到逐漸引領。工業機器人誕生于美國,並且在很長一段時間內,美國都在技術上保持著絕對 領先。1967 年,川崎重工引入日本第一台 Unimate 工業機器人,並在 1968 年仿制出自己的工業機器人。受益于國 內勞動力短缺、下遊産業的強大需求、政策扶持等因素,日本工業機器人行業在 30 年內完成了從模仿到引領的蛻變。
我們認爲,日本能取代美國,成爲工業機器人領域領導者的原因主要有四點:(1)經濟快速發展的同時,勞動力出 現了短缺;(2)下遊應用推動;(3)政策大力扶持;(4)石油危機等因素。下面我們就這四點原因來一一梳理分 析。
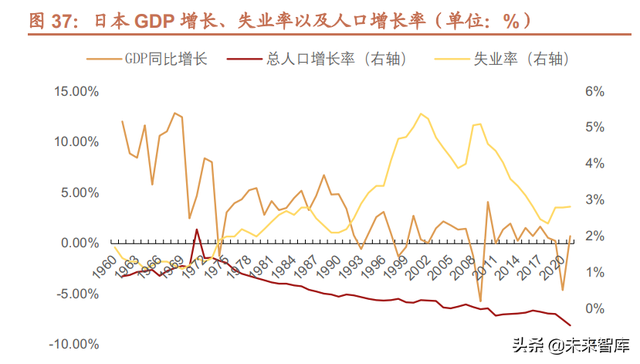
(1)經濟騰飛,人力短缺
日本在二戰後經濟開始騰飛。由于國內民主改革,石油價格低,以及美國的戰略扶持等原因,日本的經濟迅速恢複, 在 1951 年恢複到了戰前水平。1960 年到 1980 年間正處于經濟飛速發展時期,GDP 增速最高達到 25%。1965 年國 民生産總值躍居世界第五位,1968 年超越西德,成爲僅次于美國的經濟大國。 勞動力出現短缺。1960 年到 1980 年間,日本名義 GDP 複合增速達到了 14.6%,實際 GDP 複合增速達到 6.7%,而 勞動人口的複合增長率僅爲 1.1%。快速的經濟發展和産業擴張對應著對生産力的需求旺盛,但勞動人口的數量卻無 法滿足龐大的生産需求。這個時期的失業率極低,在 60 年代的很長時間內甚至低于自然失業率(1.5%~2.5%),並 且在 60~80 年代之間一直維持著較低的失業率。在當時,日本的招工崗位甚至多于求職人數,勞動力的短缺大大提 升了勞動者的議價能力。與此同時,日本的人口增長率 70 年代後在一直維持在較低的水平,低人口增長率意味著勞 動力的短缺具有持續性,如果繼續保持勞動密集型的生産方式,未來的勞動力供給將會持續不足。
勞動力短缺導致用人成本迅速升高,機器人順勢增長。根據經濟學原理,市場供不應求的直接結果就是賣方價格的增 加,而日本制造業 1955~1980 年間平均薪資的大幅增加也從側面驗證了這一原理。值得注意的是,1965 年~1975 年 間,制造業薪資水平的複合增長率高達 16.55%。正是這段時期,日本工業機器人完成了從搖籃期到實用期的演變。
(2)汽車行業推動
汽車行業在日本發展迅速。日本汽車行業在 20 世紀 60 年代進入高速發展時期。1960 年時,日本的汽車年産量僅爲 48 萬,遠低于美國和西歐國家等主要汽車生産國的産量。1967 時,日本的汽車年産量已經突破了 300 萬,一舉超越 德國成爲了第二大汽車生産國。到 1980 年,日本的汽車年産量已經達到了 1000 萬,成爲了世界第一大汽車生産國。 20 年間,汽車的産量增長 20 余倍,複合增長速度達到了 16%。
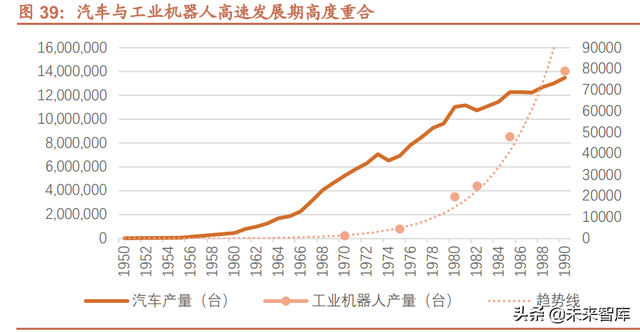
汽車行業支撐了工業機器人的早期應用。汽車行業是工業機器人應用最早、最廣,應用能力最強的行業,機器人密度 往往是其他行業的 4 倍以上,時至今日,汽車行業依然是工業機器人應用最頻繁的行業。汽車業對産品尺寸、質量、 精度和組裝的要求較高,需要高質量、大規模的生産力,同時生産中會涉及到危險、高溫等人類難以忍受的工作環境, 工業機器人則可以有效的完成替換。由于汽車生産廠商規模龐大,現金流充足,有足夠的經濟實力去進行“機器換人”。 再加上當時汽車行業競爭激烈,運用工業機器人可以顯著的降低人力成本,提高産品質量,增強競爭力。日本汽車廠 商相較于其他廠商,面臨著快速擴張的渴望和勞動力供給不足的矛盾,更有動機去引入工業機器人。 日本汽車行業與工業機器人行業相互成就。1970 到 1980 這 10 年間,日本汽車産量的複合增長率爲 7.6%,工業機 器人産量的複合增長率爲 30.8%,兩個行業的高速發展時期高度重合。汽車廠商作爲財大氣粗的“金主”,爲工業機 器人行業解決了發展初期資金不足、入不敷出的問題。作爲回報,工業機器人也爲汽車行業提供了高效的生産力,解 決了汽車行業勞動力短缺的問題。發那科就是通過與美國通用合作,借助其投資,完成了技術的叠代。
(3)政策扶持
日本出台多項扶持政策鼓勵工業機器人行業的發展。提到政策扶持,大家就會聯想到中國政府,我國經常因爲較多的 市場扶持政策而被诟病。但事實上,幾乎所有政府都會對國內重要産業采取一定的保護、扶持政策。日本政府就在工 業機器人産業發展早期出台了多項政策進行扶持:政府銀行會提供優惠的低息資金,鼓勵集資成立機器人長期租賃公 司,公司出資購入機器人後長期租給用戶,使用者每月只需付較低廉的租金,大大減輕了企業購入機器人所需的資金 負擔;政府把由計算機控制的示教再現型機器人作爲特別折扣優惠産品,企業除享受新設備通常的 40%折扣優惠外, 還可再享受 13%的價格補貼。此外,國家還出資對小企業進行機器人知識培訓和技術指導等。
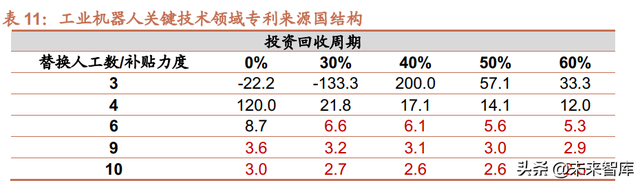
適當的補貼對工業機器人行業意義重大。工業機器人在日本剛剛起步時,其技術還不成熟,實際應用中還存在較多問題,例如美國通用公司對工業機器人的第一次應用嘗試就以失敗而告終。因此,在發展的初期,工業機器人行業亟需 包容、呵護,適當的補貼可以大幅增強産業的信心。從機器人采購商的角度來看,補貼的存在降低了企業使用工業機 器人的成本,縮短了投資回收期,刺激了工業機器人的消費量;從機器人生産商角度來看,補貼爲工業機器人帶來了 較爲穩定的收入來源,解決了前期研發投入大的問題,促進了行業技術的發展與進步。 我們對補貼力度對投資回報周期的影響做了簡單的測算。由于缺乏 1980 年時工業機器人的價格,我們使用 1996 年 日本進口工業機器人價格的均價代替 1980 年的價格進行計算,即 1500 萬日元/台。按照當時汽車行業的工作效率, 每台工業機器人可以替代 6 個勞動力,當時的工人平均薪資爲 80 萬日元/年。通過計算,我們發現如果沒有補貼的存 在,工業機器人的投資額是無法在使用年限(8 年)內收回的,即購買工業機器人進行換人是非理性的。通過敏感性 分析,我們發現,當人均薪資越高,補貼力度越大時,投資回收周期越短,購買工業機器人的意願便越強,當機器人 替換勞動力數量達到 6,政府補貼達 40%時,機器人的投資年限可以縮短到 6 年。補貼的存在直接改變了人們對工 業機器人的采購意願。
對于當前的中國來說,機器換人的性價比已經較當年的日本大幅提高。一個普通 6 軸焊接機器人的價格在 15 萬元左 右,加上系統集成配套,也不過 30 萬元。而一般焊接機械臂可以替代 3 個成熟焊工勞動力,成熟焊工的工資在 8-10 萬元,按照簡單測算,企業投資一個 6 軸機器人,1 年左右的時間便可收回成本,性價比極高。(報告來源:未來智庫)
(4)外部因素
石油危機的爆發迫使日本制造業在生産效率上追求極致。在 1973 年爆發“石油危機”後,原油價格從每桶 3 美元大幅 上漲到 10.6 美元。石油危機的爆發讓石油資源匮乏的日本受到了很大的沖擊,制造業的生産成本驟增。在石油價格 與人工成本飙升的雙重夾擊下,提高生産效率是唯一的選擇。這個時期,工業機器人完美的迎合了制造業的需求。
美國對日的貿易逆差迫使日元貶值。與現在的情況類似,20 世紀 80 年代初期,美國財政赤字劇增,對外貿易逆差大 幅增長。美國希望通過美元貶值來增加産品的出口競爭力,以改善國際收支不平衡狀況。1985 年,美國、日本、聯邦 德國、法國以及英國的財政部長和中央銀行行長在紐約廣場飯店舉行會議,達成著名的“廣場協議”。從這之後,不 到 3 個月的時間內,美元從 1:250 日元降到了 1:200 日元,跌幅達到 20%。在 1987 年,美元貶值爲 1:120 日元。日 元的大幅升值降低了日本出口的價格優勢。
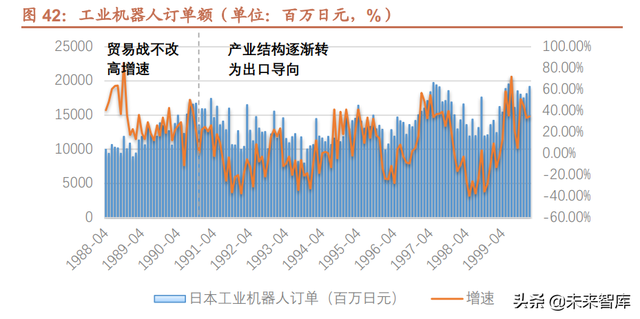
制造升級的需求受貿易戰影響較小。在“廣場協議”前後,美國發起了多個貿易保護措施,主要涉及鋼鐵、彩電、汽 車以及半導體行業。日本都以較爲消極的限制出口爲應對方式。然而美國的貿易保護並沒有影響到日本工業機器人産 業的崛起。美國在 70 年代對彩電與 1981 對汽車行業的貿易戰並沒有對日本的工業機器人造成實質的影響。可以看 到,在 1987~1990 年間,日本工業機器人的訂單仍然保持著較快的增長速度。我們認爲,這是因爲日本大部分的工 業機器人都在本國使用,較少出口到美國。其次,工業機器人作爲一種資本性投入,買方意願主要取決于其投資回報 率。當工業機器人的單位産出成本低于人工成本時,工業機器人的需求是具有一定剛性的。貿易戰對生産成本的影響 較小,對企業對工業機器人的購買意願影響不大。
5、“後起之秀”——中國
正如 70 年代的日本一樣,現階段中國也存在著勞動力短缺、成本上升等諸多問題,兩者之間擁有驚人的相似度。而 正是這些相似的因素,讓日本成爲了如今的“機器人王國”,也賦予了中國工業機器人産業無限的潛力。
(1)經濟快速增長遭遇勞動力短缺
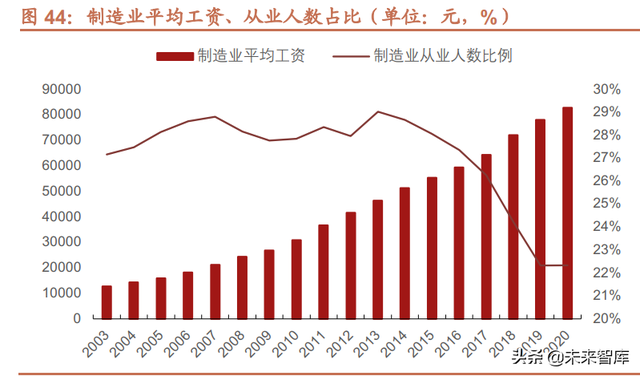
我國經濟自改革開發以來,便走上了快車道。1979 年~2013 年,我國 GDP 平均增長率爲 9.8%,而世界同期僅爲 2.8%。近年來,我國的經濟增速相比之前有所減緩,但仍然保持著較高增長速度,2019 年我國 GDP 增速達到 7.31%, 2020 年受疫情影響增速降至 2.74%。 在經濟保持高增長的時期,我國的制造業勞動力相對短缺的問題逐漸開始顯露。從制造業從業人員的絕對數來看, 2013 年開始我國制造業的從業人數開始減少,從峰值的 5258 萬下降爲 3806 萬,減少 1452 萬人。近年來不斷攀登 的老齡人口比例是未來勞動人口短缺的一個先行指標。2020 年,我國老齡人口比例達到 13.5%,且這一數據將隨著 時間推移繼續上升。與此同時,國內的人口增長率近年來一直維持在 0.5%左右的水平。持續上漲的老齡化比例與長 期較低的人口增長率意味著國內勞動力短缺的問題將會進一步加劇。
制造業從業人數占比出現下滑趨勢。在國內勞動力供給出現短缺的前提下,制造業同時還面臨著另一難題:教育水平 的提升使得新生勞動力不願意進入制造業,因爲制造業“髒、累、錢少”。雖然制造業平均工資水平不斷提升,制造業 從業人數的比例還是開始出現了下滑。
當 GDP 高速增長碰到勞動力短缺的問題時,工業機器人是最佳解決方案。工業機器人在簡單重複、重量大和環境惡 劣的工作環境下相比人來說更具效力。而且,數控技術、感應能力等技術的進步,使得工業機器人“換人”的效率越 來越高。如今,工業機器人不僅可以做到“換人”,且能比人更快更好的完成生産任務。我國所處的高增長、低勞動供 給的環境,給工業機器人的發展提供了完美的平台。
(2)汽車、電子産業需求旺盛
汽車與電子行業是工業機器人應用最多的行業。日本工業機器人産業高速發展的應用基礎就是其龐大的汽車産業,兩 者可以說是相互成就。一方面,工業機器人解決了日本車企勞動力短缺的問題,另一方面,車企提供的大量訂單和現 金流解決了日本機器人産業起步難的問題。直到今天,汽車行業還是機器人應用最多、範圍最廣的行業之一,2020 年 應用于汽車行業的機器人占總量的 27%。相比于 50 年前,應用幾乎完全依賴于汽車行業,如今隨著工業機器人技術 的成熟,工業機器人的應用範圍大幅擴大。近些年來電子行業成爲了工業機器人應用的“新貴”。2020 年,應用于電 子行業的機器人銷量已經達到機器人總銷量的 37%,相比 2011 年的 23%提升了 14 個百分點,遠超汽車行業成爲了 工業機器人應用最多的領域。
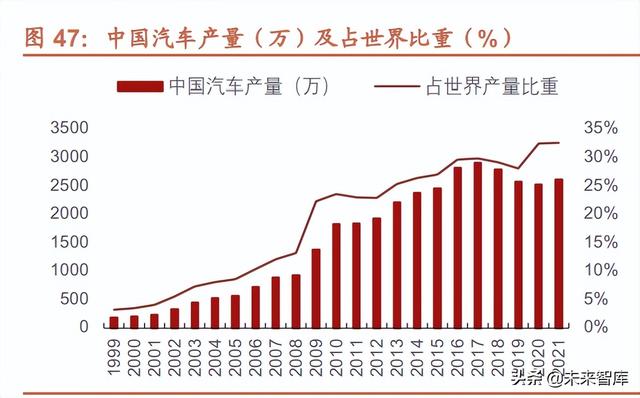
傳統應用大戶,汽車行業爲工業機器人發展夯實基礎。隨著國內經濟的飛速發展和國家的政策扶持,我國汽車的産銷 量在 2009 年開始一直保持著世界第一。從 2001 年的 233 萬輛到 2017 年的最高的 2902 萬輛,複合增長率達到了 17.06%。2020 年,我國汽車産量達世界總産量的 32.5%。龐大的産業基礎給工業機器人發展奠定了紮實的基礎。我 國汽車行業是國內自動化率最高的行業,2019 汽車工業機器人密度達到了 938 台/萬人,遠超制造業密度的 187 台/ 萬人,但是,相對于日本、美國、德國等工業強國,我國還有一定的增長空間。
國內新能源汽車行業發展迅速。據中國汽車工業協會, 2013 年我國新能源汽車銷量僅爲 1.8 萬輛,到了 2021 年, 我國新能源車銷量高達 352.1 萬台,同比+157.5%,市場占有率提升至 13.4%,另據國家統計局,截至 2021 年底, 我國新能源汽車保有量達到 784 萬輛,占世界總量的半數以上,是全球新能源汽車保有量最多的國家,也是全球最大 的新能源汽車生産國和第一大市場。新能源汽車使用更清潔、高效的能源,擁有節能、環保等特點,是未來發展的趨 勢。中國作爲世界最大的新能源汽車市場,是未來幾年內各大廠商的主攻市場。 新能源汽車給國産工業機器人帶來新機會。新能源汽車行業的發展有望打破國外工業機器人巨頭對汽車制造行業的壟 斷。過去,傳統汽車的制造廠商多爲國外獨資或者合資企業,他們更願意和“四大家族”合作。而國內新能源汽車行 業的崛起不僅會給國産車企帶來彎道超車的機會,還可以爲國産工業機器人的發展帶來契機,如新松機器人的産品已 經進入華晨寶馬、上汽、長城等國內廠商的生産線。國産工業機器人有望與國産新能源汽車共同成長。
汽車行業的總營收與人均營收同步上升。2021 年,我國汽車行業總營收達到 8.7 萬億元,同比增長6.3%,人均營收 達到 208.7 萬元,同比增長 4.9%。人均營收的持續增長正是産能不斷升級的成果。早期的汽車生産線,需要靠大量 的人力投入,生産效率低,工作環境差。在加入了工業機器人等自動化設備後,生産員工也在逐漸從“勞動型”向“技術 型”轉變。我國的汽車生産線在自動化生産領域已經初見成效。隨著自動化程度的不斷增加與工業互聯網的引入,生産 效率將會進一步得到提升。
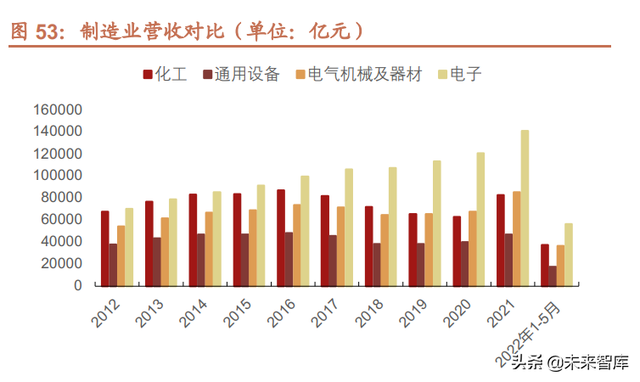
行業新貴,電子行業爲工業機器人發展添動力。隨著人民生活水平的提升,人們對電視機、電腦、智能手機等電子設 備的需求越來越大。由于生産成本的優勢,我國成爲了世界的電子産品制造工廠,全球大約 70%以上的電子産品均由 中國進行制造和裝備。自 1998 年以來,我國的電子産業的營業收入就居各大制造行業之首。2021 年,我國電子制造 業主營收達到 14.13 萬億元,占 GDP 總量的 12.35%。
電子行業的“機器換人”經濟效益顯著。以外觀件龍頭企業長盈精密爲例,其在經過一定的生産線改造後,改善效果 顯著,生産線工作人員從最初的 600 人下降到不到 50 人,每年節省人工成本 2800 萬以上。産品綜合良率從低于 70% 上升到高于 95%,單日産能也從 8000 提升到了 25000。
智能手機的生産基地主要集中在中國。中國是全球智能手機普及率最高的幾個國家之一,據中國通信院,2021 年中 國的手機出貨量達到了 3.51 億部,其中,智能手機出貨量達 3.41 億部,占總出貨量的 97.7%。得益于龐大的市場, 我國誕生了如華爲、小米、OPPO 等知名廠商。同時,中國還是世界最大的智能手機生産基地,雖然近年來手機産量 的增速有所下滑,但絕對值還保持著較高水平,2021 年全年我國智能手機産量達到了 12.7 億台。 智能手機制造“機器換人”空間巨大。手機生産的勞動密集度較高。過去,憑借著低廉的人力成本,我國的手機制造 工廠如雨後春筍般湧現,更是誕生了富士康這個全球最大的電子産品代工廠,其在 2013 年的員工人數便達到了 120 萬人,基本是一個地級市的人口數量。隨著人口紅利的逐漸消退,人力成本不再是優勢,“機器換人”便成爲了這些 代工企業唯一的出路。事實上,一些公司已經開始行動。富士康僅昆山園區就通過“機器換人”減少了了 6 萬名員工。
(3)政策扶持
中央層面出台多項政策鼓勵工業機器人的發展。《中國制造 2025》打響了制造升級的第一槍,其中指出到 2025 年國 産工業機器人的市占率達到 70%,核心零部件國産化率 80%。隨後國家又頒布多個相關政策,爲工業機器人的發展 指明道路。中央層面明確的政策爲工業機器人行業的發展增添信心、堅定目標。
各地政府對工業機器人進行積極扶持。廣東省在“工業與信息化發展專項資金”中安排工業機器人發展專題資金,並給 予一定比例的采購價格補貼;深圳市政府每年出資 5 億元專項資金,補助工業機器人等智能産業;東莞市政府給予企 業購買國産工業機器人 15%的補助,鎮一級還有 20%~50%不等的配套補貼;浙江省財政已累計安排近 6 億資金支 持 “機器換人”技術改造,出台工業機器人購置獎勵補貼政策,購置工業機器人按價格 10%補貼。(報告來源:未來智庫)
五、重點公司分析
1、工業機器人
(1)埃斯頓
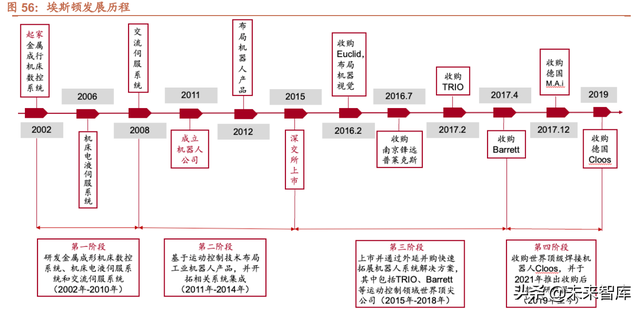
埃斯頓作爲中國最早自主研發交流伺服系統的公司,工業自動化系列産品線包括全系列交流伺服系統、變頻器、PLC、 觸摸屏、視覺産品和運動控制系統,以及以 Trio 控制系統爲核心的運動控制和機器人一體化的智能單元産品,爲客戶 提供從單軸——單機——單元的個性自動化解決方案;工業機器人産品線在公司自主核心部件的支撐下得到超高速發 展,産品已經形成以六軸機器人爲主,負載範圍覆蓋 3kg-600kg,54 種以上的完整規格系列,在新能源,焊接,金屬 加工、3C 電子、工程機械、航天航空等細分行業擁有頭部客戶和較大市場份額。
(2)彙川技術
彙川技術作爲國內工控龍頭,業務覆蓋通用自動化、電梯電氣大配套、新能源汽車、工業機器人、軌道交通等領域。 現伺服國內第一,變頻器國內前三,SCARA 機器人內資份額第一。公司自 2014 年開始布局機器人産業。2017 年, 機器人引入視覺跟蹤、飛拍等技術,“核心部件+整機+視覺+工藝”全布局,助力高端化。
(3)凱爾達
公司實控人從工業焊接設備領域起家,2002 年成立凱爾達電焊機有限公司,從事工業焊接設備業務。2009 年成立杭 州凱爾達焊接機器人股份有限公司。2012 年完成基于 PLC 運動控制器的工業機器人研發。2013 年公司完成機器人 專用超低飛濺焊接電源的研發。2017 年,推出伺服焊接機器人及配套設備。同年開始研發基于工業 PC 機+EtherCAT 總線技術的第三代工業機器人。2020 年公司薄板焊接機器人銷量位居國內第三(前二爲 OTC、松下)。
2、特種機器人
(1)億嘉和
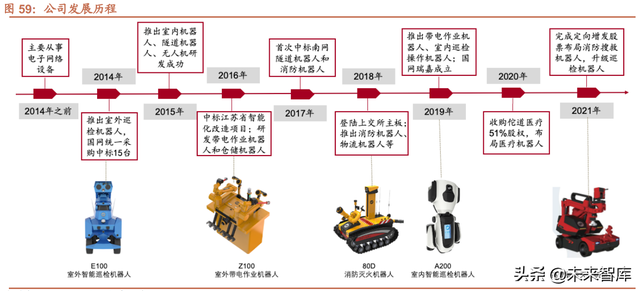
公司成立初期主要從事電子網絡設備銷售業務。2014 年起,逐步推出室內、室外巡檢機器人産品。2018 年,推出消 防機器人、物流機器人等。2019 年,推出室外帶電作業機器人 Z100。2020 年起,通過收購佗道醫療及定向增發股 票,著力布局醫療機器人領域、消防搜救機器人領域。公司最終圍繞著特種機器人,公司産品主要包括操作類機器人、 巡檢類機器人、消防類機器人三大類産品。尤其是操作類機器人的批量出貨和應用,爲公司打開了新的成長空間,也 爲公司築造了更高的技術壁壘。
3、核心零部件
(1)綠的諧波
公司率先突破諧波減速器技術難點,在實現量産、突破壟斷等方面均爲國內第一,是當前國內諧波減速器領域當之無 愧的龍頭。2003 年董事長左昱昱開始深入研究諧波齧合理論,2013 年公司首台諧波減速器上市銷售。公司是國內第 一家實現諧波減速器的量産及批量銷售的企業,現具備國內最大産能(30 萬台/年),自主機器人品牌中滲透率超 80%。 國內第一家成功突破國際諧波減速器品牌在該領域壟斷的企業,現配套大客戶包括全球協作機器人領域市占率第一的 UR 機器人,ABB,GE 等國內外重要企業。
(2)雙環傳動
雙環傳動專注于齒輪及其組件的研發、制造與銷售,已成爲全球最大的專業齒輪産品制造商和服務商之一。現産品主 要爲乘用車齒輪、商用車齒輪及工程機械齒輪。技術同源,公司自 2013 年開始研發 RV 減速器,自主研發德高精密 擺線減速器,目前公司 RV 減速器已成功進入埃斯頓等國內頭部機器人本體廠商供應鏈,並積極配合外資品牌送樣測 試。目前公司 RV 減速器産能近 6 萬台,並計劃年底擴産至 10 萬台。
(本文僅供參考,不代表我們的任何投資建議。如需使用相關信息,請參閱報告原文。)
精選報告來源:【未來智庫】。未來智庫 – 官方網站