全文刊載于《前瞻科技》2022年第2期“深潛科學與技術專刊”。
來源:微信公衆號“前瞻科技雜志”

吳有生,研究員,中國工程院院士,船舶力學與船舶工程專家,三維水彈性力學奠基人,中國船舶集團中國船舶科學研究中心名譽所長,工業和信息化部高技術船舶研究計劃專家咨詢委員會主任。
文章摘要
海洋裝備是支撐海洋科學研究、資源開發和安全保障事業的“脊梁骨”。文章簡要分析了中國當前在海洋裝備領域面臨的機遇和挑戰,針對船舶技術與産業、海洋資源開發裝備和深海裝備,概要介紹了世界海洋強國和中國的相關技術現狀,擇要梳理了最值得關切的前沿技術內涵和重點發展方向。
文章速覽
中國是一個陸海兼備的發展中海洋大國,海洋是中國經濟社會發展重要的戰略空間。世界海洋平均水深約3897 m,90%是超過1000 m的深海,蘊藏著豐富的能源、礦産和生物資源。但是當前人類對深海的認識仍停留在初級階段,大量基礎科學問題和關鍵技術亟待研究。黨的十八大提出建設海洋強國戰略,2016年習近平總書記明確指出,“深海蘊藏著地球上遠未認知和開發的寶藏,但要得到這些寶藏,就必須在深海進入、深海探測、深海開發方面掌握關鍵技術”,爲中國海洋裝備技術發展指明了重點方向。
中國海洋裝備面臨的機遇和挑戰
中國雖爲鄰海大國,但人均海域面積只居世界第122位,近海與外海的漁業可捕量僅占世界海洋漁業總可捕量的1.16%~1.75%。中國的資源並不豐富,已探明的人均石油儲量爲世界平均水平的1/9,人均天然氣儲量爲世界平均水平的1/20。經過數十年穩定發展,中國已深度融入全球經濟一體化,2020年進口石油5.42億 t,鐵礦石11.7億 t,糧食約1.3億 t,是全球最大的資源、原材料進口國,也是全球最大的工業加工品輸出國。
這種外向型經濟帶動了中國船舶與海洋裝備技術與制造業的高速發展。2003年以來中國船舶産業規模和綜合實力迅猛擴大,研發能力顯著增強。根據英國克拉克森研究公司的數據,2014年以來,中國船舶設計機構參與設計船舶的份額約占全世界的30%~35%,日本約占20%~25%,韓國約占10%~20%,歐洲約占10%~15%。中國船舶海工裝備領域研究試驗設施的齊全程度超過美國和俄羅斯,數量超過歐洲的總和。
中國經濟運行對外依存度高,需要不斷尋找新的資源來源,也對海洋裝備尤其是深海裝備技術和産業的發展不斷提出新的需求。海洋是遠未充分開發的資源寶庫,人類對海洋資源開發利用不足5%。海底稀土儲量約是陸地800倍;深海富钴結殼礦的钴、鎳、鉛、鉑儲量約爲210億 t。地球上約40%有遠景的油氣盆在水深3000 m以下的海底;有機碳的總儲能是陸上煤、石油、天然氣總儲能的2倍;中國僅南海油氣儲量就達350億 t油當量,占全國海域油當量50%;天然氣水合物資源量爲680億 t油當量,約爲陸上與近海油氣總資源量的1/2。
海洋風能、波浪能、溫差能儲量巨大。僅南海海域,溫差能理論裝機容量即爲3.67×108 kW,占中國海域海洋能資源潛在量的52%,其中技術可開發裝機容量爲2.57×107 kW。南海還有豐富的漁業資源。研究表明,南海深水養殖環境條件優越,美濟礁瀉湖內網箱養魚生長速度與質量均遠高于近海養殖。因此,有效地開發利用海洋是支撐中國經濟社會可持續發展的重要保障。
曆史經驗表明,海權競爭的激烈程度與各大國的綜合實力和發展態勢相關。因此,當前形勢下,如何保證海域和海上交通線安全,如何加快海洋資源開發利用,如何深化海洋尤其是深海的前沿科學研究,是中國在海洋方面面臨的3大挑戰。爲應對這3大挑戰,中國必須提高海洋安全保障、資源開發、科學研究3個方面的能力,海洋裝備技術及産業是支撐這3個方面能力的“脊梁骨”。
船舶技術與産業發展方向
- 中國船舶技術與産業發展現狀
中國船舶行業快速發展,與21世紀初相比生産能力大幅提升。2001年以來,英國克拉克森研究公司發布的中國、日本、韓國按載重噸計算的造船完工量見表1,20年以後中國已成爲世界第一造船大國。近年中國持續在全球造船業的造船完工量、新接訂單、手持訂單3大指標的排序中保持世界第一。
中國研發能力顯著增強,形成了涵蓋船舶基礎科學、船舶設計、新型動力與船用配套設備研發等全鏈條科研技術能力;具備建造幾乎所有船型的能力,散貨船、集裝箱船、油輪3大主流船型實現了系列化、批量化建造,大型液化天然氣(LNG)船、雙燃料推進超大型集裝箱船、大型郵輪、極地考察破冰船、汽車滾裝船、各類科考船等高技術船舶的設計建造在國際上形成了顯著的優勢;智能航行操控、能源動力智能管理、輔機運行智能監控、潔淨新能源和減阻節能等新技術裝備研發應用取得顯著進展,2018年中國船級社給文沖船廠建造的38800 t散貨船授出了全球第一個智能船標志;中國形成了較爲完整的船舶裝備技術鏈與産業鏈,中國船舶集團有限公司已是世界第一大造船企業。
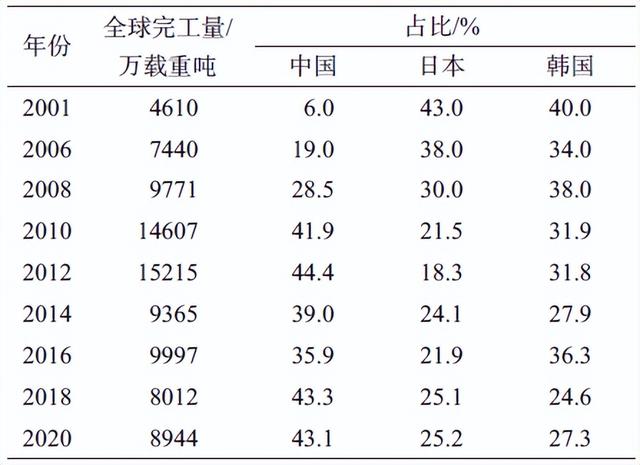
表1 中國、日本、韓國造船完工量
- 船舶技術與産業的重點發展方向
世界船舶技術與産業的發展方向是“智能、綠色、深海、極地”。
船舶智能技術包括智能設計、智能制造和智能船舶(裝備)。中國工業和信息化部發布的《智能船舶發展行動計劃(2018—2020年)》明確給出了智能船舶的定義:“智能船舶是融合感知、通信、網絡、控制、大數據、人工智能等先進技術,具備船舶自身、航行環境、物流狀態自動感知及多等級自主決策及控制的能力,在船舶航行、管理、維護、載運或作業等方面實現智能化運行,從而比傳統船舶更加安全可靠、經濟高效、環保舒適的新一代船舶”。
顯然,智能船舶技術不等同于“無人航行”技術,它包括下列8大類技術。
①感知基礎器件技術(船用物理量/化學量/生物量傳感器)。
②智能航行操控技術(航行環境智能感知與分析、智能自動駕駛、惡劣海況智能應對安全操控、航線安全性與經濟性智能優化決策)。
③能源與動力系統智能管理技術(船用低/中/高速智能內燃機、發電機組—綜合電力系統智能安全監控、供能儲能用能智能調控管理)。
④輔機安全運行智能監控技術(輔機設備運行狀態智能監測、輔機設備智能控制與故障診斷)。
⑤全船安全智能監控技術(全船網絡安全、機電設備安全、艙室環境安全、船體結構安全、火情火災監測與處置)。
⑥綠色性能智能監控技術(能耗與排放全航程實時監控、CO2/SOx/NOx減排系統監控、三大噪聲源激勵狀態實時監測、船舶輻射噪聲實時評估與智能控制)。
⑦貨物與物流智能監管技術(海運物流網系統、貨物狀態與環境管理控制系統)。
⑧船舶一體化信息系統技術(船海陸空天一體化通信與信息網絡、綜合智能導航與定位、信息智能化融合處理系統)。
中國的薄弱環節及發展智能船舶技術的重點不是“船型和船體”,而是船舶的“大腦、神經與內髒”。必須加快感知探測控制元器件、智能船用動力系統、數控配套設備、一體化觀通導航信息系統及智能軟件的研究開發,改變長期以來産業結構與科研安排中“總體設計與總裝建造”及“動力配套與觀導信息”前重後輕的不協調現象,推動船舶産業與産品的“數字化轉型、智能化升級”。
綠色船舶是“通過采用先進技術,把傳統的‘使用功能和性能要求’與21世紀的‘節約資源與保護環境的要求’緊密結合,在船舶設計、制造、使用與拆解的全周期中,節省資源和能源,減少或消除環境汙染,保障生産和使用者健康安全、友好舒適的新技術船舶”。
中國船舶領域綠色技術發展應關注4個重點方向。
①從“注重産量”轉向“注重效率效益”,著力解決“高三耗”問題是發展綠色産業的根基。制造每噸位船舶的能耗、材耗、工耗直接決定了綠色技術水平與經濟效益。目前中國船廠的“三耗”遠高于日本和韓國。必須開發船舶設計制造一體化工業軟件,加快應用人工智能、虛實結合、5G技術,進一步突破智能制造裝備與工藝的關鍵共性技術,提升船體制造切割/成形/裝配/焊接/塗裝、機電設備制造、物流和倉儲的智能化水平。
②研發綠色動力設備是中國發展綠色船舶技術的重中之重。突破應用LNG、氫、氨、甲醇的雙燃料發動機及氣體發動機關鍵核心技術,發展智能檢測、模塊化設計、電控燃燒和排放、高壓共軌燃油噴射、高效率渦輪增壓等技術,開發高可靠、高效率、低油耗、低排放、輕量化、低噪音發動機。開發譜系化的千瓦級至百兆瓦級海洋核動力及適應極地特殊環境的綠色船用發動機。
③加快開發新一代船用綠色配套設備技術是補短板及提升國産化率的必要舉措。主要技術包括新型高效節能低噪聲發電機組技術,各類低功耗安靜型數控船用泵、閥門、風機、空調和冷凍系統技術,主動力系統余熱余能利用技術,高效壓載水處理系統技術,不含三丁基錫(TBT)的防汙與減阻塗料和表面處理技術等等。
④持續開發能效指數(船舶能效設計指數(EEDI)、船舶能效運營指數(EEOI))優異的綠色品牌船型是強化技術集成能力和競爭力的重要任務。全面采用船型多目標優化、減阻節能、增效推進、航線智能優化等各種水動力學新技術,材料與結構優化設計技術,風能、太陽能等潔淨新能源輔助推進技術,雙燃料與氣體發動機技術,綠色智能輔機綜合應用技術,牽引各項綠色與智能技術的有序發展和有效應用,開發新型綠色船舶。推動船舶“軀體”與“內髒”技術和産業的協調發展,是建設造船強國的必然要求。
海洋資源開發裝備發展方向
- 海洋油氣資源開發裝備
海洋資源開發不斷地走向深遠海,2001年在墨西哥灣Alaminos Canyon的開采深度即已達2953 m。半潛式、立柱式、張力腿等不同系列的深水油氣開發平台技術已經成熟(圖1)。
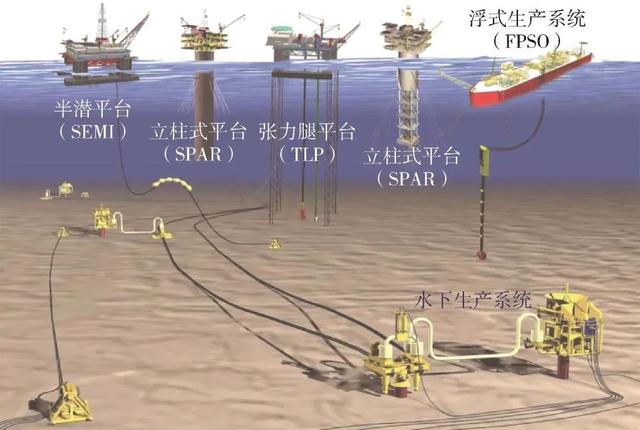
圖1 各類油氣開發平台
中國在海上稠油高效開發、近海邊際油田開發、深水海洋平台等領域達到了國際領先水平。已掌握深海水下生産系統的部分關鍵技術。例如,2008年開工建造的“海洋石油981”平台,是中國自主設計、建造的第六代深水半潛式鑽井平台,最大作業深度3000 m;2017年中國“藍鯨一號”海上鑽井平台在南海神狐嶺海區完成全球首次可燃冰試開采;美鑽石油鑽采系統工程(上海)有限公司、重慶前衛科技集團有限公司等已可設計、制造、測試水深1500~3000 m的水下采油樹等關鍵設備。
受台風、巨浪、海冰等海面惡劣條件影響,海洋油氣開發裝備的長遠發展趨勢是從水面轉入水下,俄羅斯、挪威等國提出了解決水下鑽探、供能、轉運問題的多種技術方案。
中國油氣需求及進口量龐大,需要重點解決用于天然氣水合物勘探、開采、供能、控制、輸運及立體安全監測的水面與海底裝備體系化技術,並全面掌握與下述裝備相關的關鍵技術:深遠海特大氣區多功能液化天然氣裝置(FLNG)、深水圓筒形浮式生産儲卸油裝置(FPSO)、水下生産控制系統、水下多相增壓泵與濕氣壓縮系統、水下變壓變頻供電系統、水下多相集輸及監測系統、水下應急維護系統、多功能深遠海油氣田開發與遠程補給裝置、極地油氣開發勘探和鑽井裝備、極地混凝土重力式平台和天然氣開采工程化設施、極地油氣開發遠程補給系統等。
針對長遠需求,尤其要發展支持深海能源開發工程施工作業、海底供能及應急救援的移動與固定式深海工作站技術。
- 海洋礦産資源開發裝備
最受關注的深海礦産資源是4000~5500 m海底多金屬結核礦、1500~3500 m海底熱液硫化物礦、800~3500 m深海山坡上厚度數厘米的富钴結殼礦。
深海采礦技術研究始于20世紀50年代末。針對海底礦産向水面提升的技術問題,科研人員先後提出了連續鏈鬥式(1972年)、管道提升式(1978年),穿梭艇式(1979年)等方案,但因可靠性、經濟性等因素,至今未能實現商業化應用。其中,日本、印度、韓國等采用管道提升式原理進行深海多金屬結核采礦試驗並取得了不同程度的經驗。
2014—2018年,阿聯酋MAC公司爲投資方,加拿大鹦鹉螺礦業公司爲用戶,新加坡SEATACH公司爲設計方,中國馬尾船廠爲建造方,研制世界上第一艘深海多金屬硫化物采礦船。其目的是利用位于英國的SMD公司研制成的切割、碎礦、集礦3台重型設備構成的海底采礦系統,采用管道提升方式在巴布亞新幾內亞專屬經濟區馬努斯盆地水深1600 m的Solwara 1礦區開展多金屬硫化物礦的商業性勘探開發(圖2)。但由于經濟與生態風險等多種因素,完成船體建造後,2018年6月終止了造船合同。
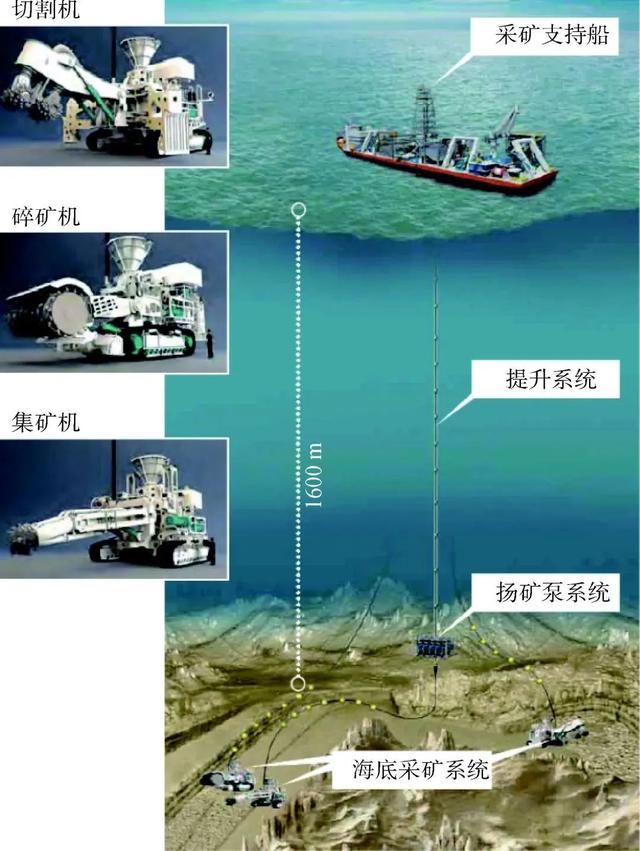
圖2 多金屬硫化物采礦系統
中國船企、礦企、中國科學院、高校在國家科技部、自然資源部、教育部支持下,針對不同礦種、不同開采方式,開展了深海采礦關鍵技術的攻關。已研制成海底多金屬硫化物采礦機、富钴結殼采礦機、深海揚礦中繼站(圖3)的樣機,完成了部分海試。
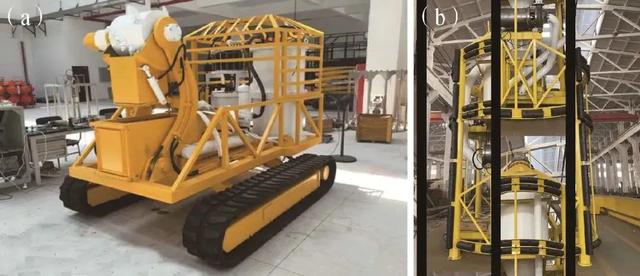
圖3 中國科學院研制的深海富钴結殼采礦機(a)及中國船舶集團有限公司研制的工作水深1700 m的水下管道揚礦中繼站(b)
深海礦産資源開發技術正處于發展的初級階段。需要解決下述采礦裝備涉及的關鍵技術和前瞻技術:大型采礦船上數百噸重采礦機布放回收與止蕩技術、水面支持船的礦物預處理與脫水排放技術、超大潛深大功率中壓輸配電技術、大功率供電與控制信息傳輸複合臍帶纜技術、深海海底采礦機驅動與行進指控技術、強振強噪幹擾環境中采礦機械高精度運動的綜合水聲導航定位技術、海床地表礦物高效掘削破碎技術、礦漿垂直管道輸送技術、長距離垂直管道粗顆粒固液兩相流輸送技術、高效節能防堵粗粒漿體特殊混輸泵技術、對海洋環境影響的評估與控制技術、低擾動智能化輔助作業水下機器人技術等。
同時,必須加強深海采礦(海底作業攪動、觸發有毒化合物排放、尾礦處理及尾水排放)對生態環境的影響研究。
- 海洋漁業資源開發裝備
發展深水遠岸海洋養殖漁業對調整中國漁業結構有重要意義。近10余年來,大型智能化網箱養殖平台及大型深遠海智慧漁業養殖工船兩類集約化、智能化漁業養殖裝備的技術在中國快速發展,一系列大型深海漁業養殖平台已投入使用。
典型的裝備爲:上海振華重工(集團)股份有限公司研制的養殖水體容積1.3萬m3的“振漁1號”養殖平台,中國水産科學研究院南海水産研究所設計的養殖水體容積3萬m3的“德海1號”平台,馬尾造船廠建造的養殖水體容積15萬m3的“海峽1號”平台,中國船舶集團有限公司武昌船舶重工集團有限公司承建的直徑110 m、總高69 m、養殖水體容積25萬m3的“海洋漁場1號”平台(圖4)。
2022年5月,青島北海船廠有限責任公司建造的“國信一號”10萬t級深遠海智慧漁業養殖工船交付使用。其養殖水體近9萬m3,可“船載艙養”,年産大黃魚、石斑魚、黃條鰤等高品質魚類3700 t。

圖4 “海洋漁場1號”平台(來源:http://www.hinews.cn/news/system/2020/08/20/032405067.shtml)
中國的深遠海漁業養殖裝備技術雖取得顯著進展,但綠色與智能化技術水平尚待提高,岸海一體工業化、集約化、信息化深遠海養殖與服務保障體系尚待建設。
爲建設大型智能網箱養殖産業鏈,需進一步提升下述裝備技術:台風海域的可定深全潛懸浮式大型養殖網箱及半潛漂浮式動力定位大型養殖網箱技術、深水網箱定深與姿態精確控制系泊技術、智能養殖輔助裝備技術(漁網汙附物智能清除系統技術、高密度魚苗船網間高效傳輸系統技術、生長狀態智能監測與投餌投藥精益養殖技術、餌料智能投餵技術、輪緣驅動活魚無傷吸捕高效出箱技術、聲光融合感知識別死魚吸取機器人技術、死魚自動集處技術)、養殖網箱綠色供能技術、大型網箱集群養殖場的氣象及魚情多源信息集成智能管理技術、活成魚運輸及速凍和智能精准加工保障船技術等。養殖工船還涉及養殖水體交換、水質調控、減振降噪、養殖艙智能集控等技術。
加強上述關鍵技術的研發,將形成工業化深遠海養殖産業鏈與服務保障體系,爲提升全民食品質量,維護國家糧食安全開創新局面。
- 海洋空間資源開發裝備
超大型浮體在海洋空間利用和資源開發方面有廣泛的應用前景。采用模塊化拼裝拓展,形成大型海上基地,可提供生活居住、商務旅遊、生産制造、能源供應、船舶停靠、飛機起降、物質存儲、海水淡化、醫療救助等各類海上保障。
近30余年來,美國、日本、中國、挪威、韓國、新加坡等多個國家先後開展了超大型海上浮式結構物技術的研究。然而,付諸實用的甚少。爲使系泊定位更加可靠,超大型浮體往往需布設在離岸線不遠或近島礁的地理環境複雜的海域中。
不同于無遮蔽開闊海域中的船舶,島礁海域浮式結構物遭遇的波浪存在時空演化不均勻的特點,受力與響應受海底地形的影響,因而設計、評估、建造、部署和運行面臨諸多前沿科學問題和新技術挑戰,包括:島礁海域風浪流時空分布不均勻性的演化機理和波流相互作用理論、複雜海洋地理環境中超大型浮體流固耦合理論、海洋超大型浮體複合系泊系統動力學與抗台定位技術、超大型浮體多模塊柔性連接力學機理及連接技術、超大型浮體結構極值載荷與安全可靠性評估方法、高鹽/高濕/高溫/高光照條件下金屬結構防腐防汙技術、大型浮體全系統安全狀態與環境智能監測技術等。
還包括各類不同功能的超大型浮體(浮式科學實驗基地、浮式綜合旅遊島、浮式溫差能發電與深層海水利用生産基地、浮式機場與海港、浮式油氣開發保障基地等)設計、建造和運行技術。
爲了應對這些挑戰,2012年以來,中國圍繞上述問題開展了系統性研究,取得了豐碩的成果。除了理論研究、數值分析方法研究、實驗室與水池的模型試驗研究外,還設計並研制了雙模塊“永樂科考”科學試驗平台。2019年以來在南海海域開展了相關技術的長期試驗驗證,持續積累豐富的環境與實用效果數據(圖5)。

圖5 “永樂科考”科學試驗平台
深海裝備發展方向
- 海底探測網絡
海洋探測對象涉及物理海洋、海洋地質、地球物理學、海洋環境、海洋生物、化學海洋、大氣科學、冰科學、軍民船舶與海洋工程等多學科信息;探測對象具有時空演化特征。衛星與航空遙感海洋觀測、船載海洋觀測、岸基台站儀器與高頻表面波雷達海洋觀測、錨系/漂流浮標與潛標海洋觀測、海底網絡觀測構成當今發展中的海洋立體觀測系統。其中,海底長期探測(觀測)網被稱爲繼調查船和衛星之後的地球系統第3個海洋觀測平台,也是軍民海洋裝備最受關注的部分。
舉若幹國外實例。美國國家科學基金會的海洋觀測系統(OOI)由區域網(RSN)、近岸網(CSN)和全球網(GSN)3部分構成,包括880 km海纜連接的7個海底主節點。2013年加拿大將VENUS海底實驗站和東北太平洋的NEPTUE Canada觀測網合並組建了加拿大海底觀測網(ONC),其包括由800 km環形主幹網連接的5個海底主節點,覆蓋了離岸300 km的海域。
歐洲多學科海底及水體觀測系統(EMSO)由13個成員國共同承擔,包含了11個深海節點和4個淺海試驗節點,覆蓋了從北冰洋、大西洋、地中海到黑海的歐洲主要水域。日本先後建設了地震和海嘯海底觀測密集網絡(DONET、DONET 2)和日本海溝海底地震海嘯觀測網(S-net)。
其中,DONET系統以15~20 km的間隔布設有線連接的22個觀測點;DONET 2系統由450 km光電複合纜、2個登陸站,7個科學節點和29個觀測平台組成。這兩個系統覆蓋了從近岸到海溝的廣大海域。S-net系統沿日本海溝布設,纜線總長5700 km,由6個子系統組成,每個系統包括800 km纜線和25個觀測站(圖6)。

圖6 日本海溝海底地震海嘯觀測網(S-net)(來源:https://www.seafloor.bosai.go.jp/S-net/)
近10余年來,在科技部、中國科學院、教育部等部門支持下,同濟大學、中國科學院聲學研究所等單位牽頭組織國內力量,在東海和南海建設了海底觀測網試驗與示範系統。
海底固定式探測網技術源自于美國的水下反潛網絡。20世紀70年代初,美國就在大西洋和太平洋(含一島鏈)部署遠程固定水聲監視系統(SOSUS),形成探潛警戒能力,監測蘇聯潛艇行動。爲彌補SOSUS的不足,美國又發展了固定與移動相結合的組合式探測網技術,包括廣域海網(Seaweb),將固定節點、移動節點和網關節點通過水聲通信鏈路組網;可部署自主分布系統(DADS),由14個固定節點及數個移動節點組成;近海水下持續監視網(PLUSNet),以潛艇爲母節點,無人潛水器(UUV)爲移動節點,以潛標、浮標、水聲探測陣爲固定子節點。此外,近年來美國和俄羅斯分別在原有探測網絡的基礎上發展了具備通信導航功能的水下GPS及水下格洛納斯系統。
水下固定與組合式探測網絡技術的應用必無止境,下述6大領域的關鍵技術會與時俱進,不斷發展。
一是多物理場感知器件技術。必須提升高耐壓/靈敏/可靠/低耗能/水密的標量與矢量水聲換能器技術、紅外與極低頻電磁場感知器件技術,盡快自主掌控高可靠/高靈敏/低功耗的各類海洋動力環境與各類海洋生態環境監測傳感器及儀器技術。
二是針對水下運動目標以聲爲主的多源信息組網協同探測技術。重點發展低頻聲探測大尺度線陣與立體陣優化組陣技術、大深度陣列有效聲路徑向上探測技術、固定與機動結合的分布式組網探測技術、多源數據融合目標定位與區域跟蹤技術、水下機動目標低頻線譜聲紋特征遠距離聲陣探測與識別技術、電化學腐蝕磁場與紅外光信息中距離探測技術、基于自主學習的目標精細識別技術等。還需解決流、渦與內波作用下長纜與立體陣動響應安全性及保形技術。
三是針對深海科學(海洋環境、海洋物理、地質與地球物理、地球化學、海洋微生物等)長期研究的海洋觀測網監測技術。主要需發展海床基自動觀測站/網管節點/觀測節點技術、大深度海底海洋動力/海洋生態參數監測設備技術、接駁盒技術、自動升降剖面浮標技術(測溫鹽深、海流、電導率……)、信息融合控制技術等。
四是水下通信鏈技術。非岸基連纜網必須解決固定節點間光纜或水聲通信技術、固定與移動節點間水聲/近距離激光/濕式接駁信息傳輸技術、深海節點與陸站間借助自主潛水器(AUV)與浮標的水聲—電磁波跨介質中繼通信技術。
五是深海探測網高密度能源技術。非岸基網需解決深海電堆模塊化更換技術、自主航行的有人/無人充電平台技術、接觸與非接觸式電能對接傳輸技術等。
六是定點布放與維修技術。包括:探測網節點陣列與纜線布放技術(水面或水下搭載投送、准確布放、固位整形、系統聯接、供電調試技術等)、無人智能巡檢技術、海底原位維修技術、模塊化部件更換技術等。
- 無人潛水器
當前無人潛水器已成爲完成深海探測、作業及特定軍民任務使命的重要工具。無人潛水器主要分爲遙控潛水器(ROV)、自主潛水器、拖航體、海底探測器等多類,並隨需求變化會不斷推陳出新。
ROV由載人裝備布放回收與操控,具有工作時間、供能、作業能力強的優勢,已成爲各類深海作業的重要裝備。作業水深覆蓋幾十米至上萬米、重量由幾千克至數十噸,形成了一個有超過400家廠商提供270多種型號産品與服務的新産業。
1966年美國軍方開發的“CURV Ⅱ”ROV在西班牙外海海底869 m水深處,成功打撈了一枚丟失的原子彈。1973年美國“CURV Ⅲ”在愛爾蘭480 m水深處,成功救援了“雙魚座Ⅲ”號載人潛水器以及兩名潛航員。日本海洋科學技術中心研制的“KAIKO 11000”ROV曾是世界上下潛最深的ROV,配置了攝像機、聲呐和機械手。1994年下潛到馬裏亞納海溝11022 m最深處,曾從海床沉積物中采取到微小的單細胞生物。但2003年執行海洋考察任務時因臍帶纜斷裂而丟失。
中國自20世紀80年代末自主研發了工作深度爲600 m的“8A4”ROV以來,先後研制了工作深度從幾十米到6000 m的多型作業級ROV,包括4500米級“海馬4500”ROV、6000米級“海星6000”ROV(圖7)以及“海龍”系列ROV。中國已具備自主設計、集成與應用大深度ROV及研制6000米級或萬米級關鍵部件(包括多波束聲呐、機械手、光電铠裝纜、锂電池、浮力材料等)的技術,但尚未形成商業化優勢。
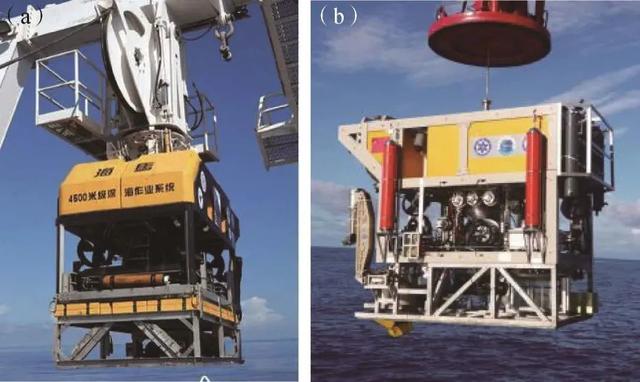
圖7 “海馬4500”ROV(a)和“海星6000”ROV(b)(來源:https://www.cgs.gov.cn/xwl/ddyw/201603/t20160309_299047.html;http://www.sia.cas.cn/kxcb/kpwz/201905/t20190521_5298681.html)
AUV具有自主決策和控制能力,可高效地執行各類深海環境探測、目標搜索定位、投送運載、信息傳輸、偵查打擊等水下任務,已形成新興産業和成熟市場。美國“海馬”號、“回音”號大型AUV、伍茲霍爾海洋研究所的3體ABE AUV、Hydroid公司的Bluefin系列AUV,挪威Kongsberg公司的REMUS系列AUV,英國的泰利斯曼系列AUV,以及俄羅斯正在研制的“波塞冬”核動力UUV爲有代表性的産品。
美國“REMUS 6000”在2010年成功搜尋到法航447的發動機殘骸。中國從20世紀90年代初開始AUV技術研究以來,已有近20家單位開發了幾十種類型AUV,類型覆蓋便攜型、輕型、重型和巨型。中國成功研制了“CR-01”和“CR-02”號AUV、“潛龍”系列AUV、Merman 6000系列AUV、“探索”系列AUV等。其中,“探索1000”號AUV在中國第35次南極科學考察中實現了極區海洋觀測的應用突破。
進入21世紀,中國、美國、瑞典、韓國等都開展了既可以自主航行與作業,又可以經由光纜遠程遙控執行任務的自主遙控潛水器(ARV)研制。美國研制了“海神”號(Proteus)和“N11K”號ARV。中國于2008年研制成“北極”號ARV,用于北極科考;研制的“海鬥一號”ARV于2021年下潛到10907 m深海,遙控40 kg機械手抓取了樣品。水下滑翔機技術也取得了一系列成果。
雖然世界上無人潛水器技術已基本成熟,但有3個重點方向將會不斷發展。一是基于高密度能源、海洋能、近水面光能、仿生水動力推進與減阻的AUV遠程化技術。二是高效能、高可靠的超大潛深共性通用技術(包括高精度導航、聲/磁/電/重/震傳感器與測量儀器、高強低密浮力材料、水密接插件、全海深铠裝纜、靈巧水下機械手、深海液壓動力源、全海深電機及傳動裝置等)。三是支撐多使命任務的智能化、集群化技術(包括多ROV的智能輔助協同作業、AUV編隊的地形/環境/物理場探測、目標物多元感知和精細識別、察打一體化AUV集群的多點高效能毀傷攻擊等)。
- 載人潛水器
人類爲進入深海,了解未知世界,付出了巨大努力,載人深潛是這一領域最有代表性的技術。根據美國海洋技術協會載人潛水器委員會的數據,全球目前營運的載人潛水器約有160艘,其中潛深超過4500 m的現役載人潛水器見表2。這些載人潛水器的應用,充分顯示了專業人員親臨深海和洋底現場進行直接觀察和勘查的優越性。
其中,美國的“阿爾文”號(Alvin)經曆過多次改造,迄今已進行過近5000次深海科學考察,取得了首次發現海底熱液區等重大發現,基于其工作發表的科學文章已接近2000篇。1966年“阿爾文”號還率先在帕裏馬雷斯氫彈事件中于近千米深的海底找到了丟失的氫彈。
俄羅斯“和平”號(MIR-1和MIR-2)載人潛水器參與了太平洋和大西洋中的熱液礦床調查,東大西洋、地中海與印度洋中部的洋底山脈研究,洋底動物群及洋底地質結構研究等。1988—1997年10年間,“和平”號(MIR)下潛約500次,基于其工作發表的論文接近200篇。“和平”號也參與了部分軍事任務。

表2 現役載人潛水器
2012年著名導演詹姆斯·卡梅隆乘坐“深海挑戰者”號(Deepsea Challenger)探險馬裏亞納海溝。2018年美國Ocean Gate公司建造成載5人、潛深4000 m的“Titan”號載人潛水器。2019年美國Triton Submarines公司研制的全海深“極限因子”號(Limiting Factor)成功下潛馬裏亞納海溝。
2012年中國研制的“蛟龍”號到達7062 m的深海,標志著中國深海裝備技術的跨越發展。2017年中國自主研發的潛深4500 m的“深海勇士”號交付使用,國産化率達95%,實現了中國深海裝備由集成創新向自主創新的曆史性跨越。
2018年“深海勇士”號在南海、西南印度洋、馬裏亞納海溝等地完成下潛260次,潛水器運行時間占75%,技術水平、連續下潛次數、作業時間、下潛人數均達到了國際領先水平。
2021年“深海勇士”號參與了印度尼西亞失事潛艇打撈。2020年11月10日“奮鬥者”號(圖8)下潛到馬裏亞納海溝10909 m海底,標志著中國具有了進入世界最深處開展科學探索和研究的能力。截至2022年6月,“蛟龍”號已成功完成約216潛次;“深海勇士”號也已成功完成約460潛次;“奮鬥者”號2022年開啓常規科考應用,完成了兩個航段任務,目前已累計完成21次萬米下潛,有27位專家乘坐“奮鬥者”號載人潛水器到達全球海洋最深處,萬米深潛次數和人數居世界首位。

圖8 “奮鬥者”號載人潛水器
隨著載人潛水器應用領域的拓展,需要進一步發展下述技術:可靠性/安全性/維修性/保障性/測試性/環境適應性數據模型與技術體系、智能輔助航行與姿態操控技術、系統故障智能識別與智能輔助避險技術、內波與極地等特殊環境適應性技術、新材料(如大面積視野通透材料、高強輕質耐壓與浮力新材料)應用與安全性評估技術、高能量密度新能源技術、聲學與視覺智能識別技術、多功能探測與作業專用工具技術等。
- 深海工作站與海底原位研究實驗室
1)深海工作站
海底資源開采、深海長周期原位研究、深海軍事設施建設必然要求突破小型載人與無人潛水器和大型軍用潛艇3類裝備各自的局限性,發展大型有人裝備與智能無人系統相結合,在深海海底完成長時間、大功率、大負荷、大範圍探測與工程作業任務的裝備技術。這樣的數百至數千噸級作業型載人深海裝備是大型機動式深海運載與主控平台,俄羅斯和美國稱之爲“深海工作站”或“深海特種潛艇”,又稱爲“深海空間站”。
美國1965年最早開始研制“NR-1”號核動力工作站(圖9)。“NR-1”號正常排水量365 t,最大潛深約1000 m,采用小型壓水堆,配備了側掃聲呐、多普勒聲呐、多種光學相機等探測裝備及機械手。服役期間完成了大量特殊任務,包括:亞速爾群島水下監聽系統的安裝與維護、偵察蘇聯/俄羅斯在地中海的水下監聽系統、在地中海竊聽利比亞海底通信電纜、打撈F-14戰鬥機及“挑戰者”號航天飛機殘骸等。
“NR-1”號也承擔了大量民用海洋科考任務。美國海洋地質學家布魯斯·希森搭乘“NR-1”號,通過深海原位考察推翻了自己曆時8年寫成的海洋地質專著的某些論點。2008年“NR-1”號退役前,美國提出了建造新一代千噸級“NR-2”號的3種方案,排水量828~2062 t,載員13~15人,攜帶ROV和AUV爲作業工具。
受美國海軍委托,蘭德公司組織多方面專家調研了2015—2050年預計執行的任務及能力需求,于2002年論證提出了“NR-2”的9項民用任務需求(按優先等級排序爲:海洋物理學、冰科學、地質和地球物理學、海洋生物學、海洋工程、環境科學、化學海洋學、大氣科學、海洋考古學),並從17項中優選出7項軍用任務需求。蘭德公司的報告認爲,“如果沒有諸如‘NR-2’之類平台提供的能力,美國《聯合展望2020》中關于海洋領域的全頻譜優勢的目標就無法實現”。
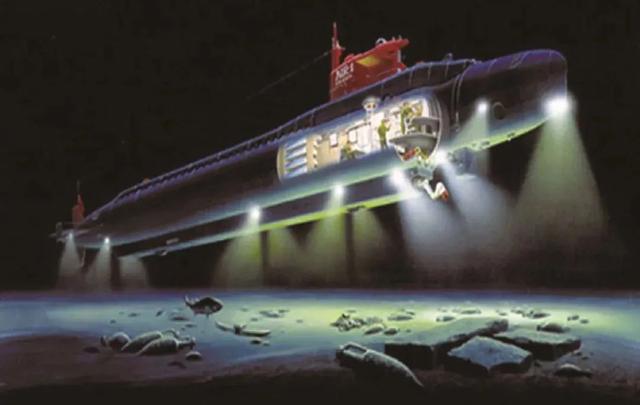
圖9 美國“NR-1”號核動力工作站(來源:https://man.fas.org/dod-101/sys/ship/docs/nr_1.htm)
蘇聯/俄羅斯自20世紀70年代起研究深海工作站,1986—2003年共研制了三型7艘潛深1000~3000 m、排水量950~1400 t的核動力深海工作站(表3),承擔軍民任務。2014—2020年全部進行了現代化改裝。1910型深海工作站隸屬北方艦隊,1994年參加了巴倫支海的科學考察,2000年參加了“庫爾斯克”號核潛艇的搜救。“小馬駒”深海工作站采用串聯球殼結構,排水量1600 t,最大潛深3000 m(圖10),2012年在北冰洋門捷列夫大陸架采集了大量地質岩芯,爲俄羅斯申訴擴展北極控制區域的海洋權益提供了依據。2019年“小馬駒”在巴倫支海發生火災,引起國際廣泛關注。
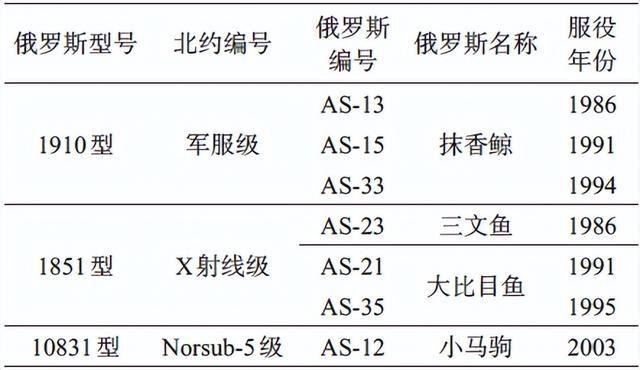
表3 俄羅斯深海工作站
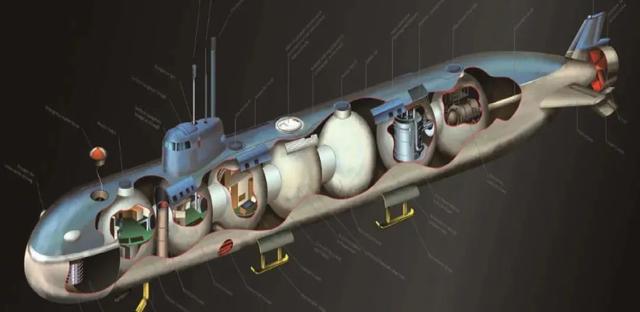
圖10 俄羅斯10831型“小馬駒”深海工作站(來源:http://www.hisutton.com/Spy%20Sub%20-%20Project%2010831%20Losharik.html)
美國和俄羅斯的深海工作站扮演著“深海工程兵”的角色,它們力圖通過建設或破壞水下信息系統,建立本國的深海信息優勢。美國海軍評價,“NR-1”號確立了美國對大陸架海域的統治權”;俄羅斯則聲稱:“誰能控制海底,就能控制海洋,俄羅斯的深海工作站是世界領先、甚至是獨一無二的。”
2)海底原位研究實驗室
深海前沿科學研究、可燃冰與生物資源的研究與開發方興未艾,適應深海長期駐留、原位研究開發的需求,將實驗室建到海底,利用深海環境條件開展連續觀測、篩選取樣與保藏、原位實驗與開發,已成爲海洋科學研究新手段。海底原位研究實驗技術也成爲國際上研究的焦點。
1962年美國“Man-in-the-Sea Ⅰ”號和法國“Conshelf Ⅰ”號水下實驗室首次在地中海進行試驗。迄今爲止,世界上已有超過65座海底原位實驗室系統建成並運行。其中,相當一部分水深只有數十米,如美國“Aquarius”號、SEALAB系列。表4給出了水深超過100 m的3個實例。德國“Helgoland”號是世界上第1座爲冷水區建造的水下實驗室(圖11),主要用于研究海底生物、生態環境、微生物和真菌、減壓和潛水病。海底實驗室在海洋環境、海洋酸化、全球氣候變化、海洋生態(如珊瑚礁、海草、魚類等生物和水質生態環境變化)以及人類在海底生活的各種生理狀況的研究中發揮了一定的作用。
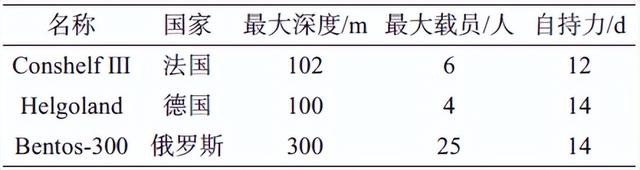
表4 國外典型水下實驗室

圖11 德國“Helgoland”號水下實驗室
3)深海工作站和海底原位研究實驗室的關鍵科學技術問題
目前,世界上已有的深海工作站在作業模式上基本是單體運作,作業功能手段較爲單一;數控化、信息化、智能化水平不高。現有的海底原位研究實驗室工作深度較淺,尚未進入500 m以深的深海領域。世界深海研究開發尚處于初級階段。
未來深遠海開發的需求及世界海洋裝備技術的發展趨勢決定了“深海探測作業功能”需要實現由水面到水下海底、由短時到長期、由小功率到大功率、由小負荷到大負荷、從點域到大範圍的5個維度的拓展;“深海裝備及探測作業技術”需要實現從小型裝備向大型裝備、單體探測作業向集群協同作業、水面操控無人裝備作業向水下有人裝備與智能無人裝備融合作業的3大跨越。
深海工作站和海底原位研究實驗室即是適應該發展趨勢的深海裝備。未來的深海工作站將會攜帶可模塊化更換的多類海底有纜或無纜無人探測與作業裝備,構成水下集群探測作業系統;海底原位研究實驗室也將有人與無人技術結合起來,增強深海實驗研究能力。這兩類深海裝備體系有許多共性科學問題和關鍵技術,主要有下述6大類。
(1)深海大型耐壓結構極端環境安全性技術。深海耐壓結構材料包括以高強鋼和钛合金爲主的金屬材料,以及纖維增強複合材料、新型陶瓷等非金屬材料。它們需具備高屈服強度、高剛度、高塑韌性、高抗爆性、良好的焊接加工性能、耐海水腐蝕性能和抗低周疲勞性能。
需要解決數千米深度超大潛深大型耐壓結構制造工藝及深海極端環境中安全性所涉及的基礎科學問題與關鍵技術。包括:深海大型钛合金耐壓結構焊接組織性能及焊接成形工藝力學、超大潛深大型钛合金耐壓殼體極限承載能力和低周疲勞性能評估與控制、大型钛合金耐壓結構應力腐蝕及裂紋萌生擴展機制、钛合金承壓結構常溫蠕變行爲與多尺度失效模式耦合的安全性評估、钛合金耐壓結構服役退化過程時空演化規律等。
(2)高能量/高功率密度動力技術。數千米水深處大功率、長時間探測與作業所需的高密度動力與供能技術的複雜程度遠超水面船及潛艇。需解決高容重比制氫儲氫的超大潛深燃料電池動力技術,超大潛深智能控制鉛铋堆等新型核動力技術,高可靠性高能量密度新型電池技術,基于熱電偶、熱離子、堿金屬的靜態電能轉換技術,深海電能轉接補充技術,利用溫差能、地熱能的未來長周期海底有效供能技術等。
(3)深海水下通信導航技術。電磁波與光波在水中衰減迅速,10 kHz電磁波水下每千米衰減4500 dB,1 Hz極低頻電磁波水下每千米衰減約31 dB。聲波是海洋中遠距離信息傳輸唯一的有效載體。但水中聲波傳輸速度僅爲空氣中電磁波速的1/2×105,且海洋聲波傳輸環境複雜,因此,深海航行裝備在水介質中通信、定位、導航及遙控所需信息的傳輸遠比空天航行器及陸上運載裝備困難。
爲克服該困難,提升深海有人—無人裝備的互聯互通與定位導航能力,必須圍繞以下方向發展並應用新技術:克服水聲信號傳輸經常遇到的弱聯通/高時延/強幹擾/頻散畸變/非完整弊端的各類時空增益技術與數據處理技術(包括擴頻、複雜脈沖聲信號構造、全息多維編碼調制等)、利用有效聲信道(Effective Acoustic Path)的深海“GPS聲呐星座”垂向通信導航與探測技術、利用最小聲速層聲道軸的水平遠距離低速率信息傳輸技術、跨水空介質的水聲—電磁信息傳遞技術、UUV與駐留浮標多元中繼聲傳輸技術、極低頻電磁波/地波超遠距離信息傳輸技術、近距離激光高速率信息傳輸技術等。除借助信息傳輸導航定位外,至關重要的是提高現有靜電陀螺、MEMS陀螺、光纖陀螺的精度,減小功耗和尺度,發展量子慣導新技術及大地磁場/重力場/海底地形匹配等定位導航技術。
(4)超高壓環境中多元異構探測作業裝備及有效載荷模塊化搭載與進出艙技術。爲避開水面惡劣風浪環境條件的影響,提高作業安全性與效率,未來海底資源的開發與原位實驗室(站)的建設,必然涉及多平台的協同作業。其中,深海大型機動式運載與主控平台(如深海工作站)模塊化搭載、收放、對接與操控多類型/多功能/異構的無人裝備是一項關乎作業效能和安全性的關鍵技術。模塊化搭載一般可分爲幹式搭載和濕式搭載兩類。其中,幹式搭載是將小型有纜/無纜無人裝備存放在大型運載與主控平台耐壓殼體內部,便于淡水清洗與維護;濕式搭載是將它們置于透水塢艙中或外挂在舷外。
此外,還需要解決超高壓環境中采獲的樣品或特殊打撈物、各類待布放或回收的通用/專用儀器設備等有效載荷的入艙、存儲與轉運問題。模塊化搭載與進出艙作業涉及的前沿技術主要包含:智能交彙航迹動態規劃與重構方法、基于高低頻多信標的近距離水聲三維精確定位導引技術、基于光視覺的近體複雜視景條件下對接導引技術、多源融合導引的近壁動態對接自適應控制技術、面向移動終端的智能對接技術(罩籠式對接、鎖杆式對接、坐落式對接、機械臂或ROV捕獲式對接等)、聲光融合引導定位進出艙技術、模塊化搭載的艙內鎖位與智能監控技術等。
有效載荷存儲與轉運還需要重點解決深海高壓條件下有效載荷存儲幹濕轉換、狹小幹式艙內無人裝備及敏感設備的檢測維保、等壓濕式存儲與高效轉移、超大潛深有效載荷進出通道安全啓閉、大型平台裝載量變化與重心移位的智能化載荷代換及姿態調整等關鍵技術問題。
(5)深海有人—無人集群裝備協調操控探測作業技術。深海有人大型機動式運載與主控平台在千米水下操控ROV、AUV、吊車、鋪纜機等多型無人裝備集群進行海底高效工程探測與作業,涉及整個作業鏈的一系列關鍵技術。
一是作業環境(海底地形地貌、地質、水文環境)與待處置作業對象(物理、化學、生物與形態特征)的精細探測技術。包括基于水面船或無人探測潛水器編隊的區域掃描探測與數據融合、深海工作站操控ROV與AUV進行的現場精細探測與分析等技術。
二是深海纜接多浮體集群作業的動力學協調與運動控制技術。包括纜接無恢複力多浮體剛柔耦合系統動力學理論與運動控制仿真、大型浮體姿態自適應控制、複雜擾動下多元作業載體避幹涉/避纏纜智能控制等技術。
三是海底機電設施類有效載荷的布放就位技術。包括大型運載與主控平台動力定位、有效載荷吊放、ROV協助就位/展開/錨定/模塊裝配/管纜對接/電源接通/系統調試/狀態檢測等技術。四是海底設施運行過程中維修保障技術。包括操控ROV並利用相應工具與模具實施的修理作業、部件與能源更換、信息獲取等技術。五是海底網線鋪設技術。包括挖溝鋪網機的吊放與回收、作業供能與操控等技術。六是海底設施與網線的處置技術。包括特定對象的幹擾、破壞、毀傷等技術。
(6)生命支持與應急救援技術。深海長期駐留與開發作業對幽閉環境中人員的生理和心理承受力都是極大的考驗。與航天空間站相比,深海環境條件更加惡劣複雜,需要在現有技術的基礎上進一步探索應急救生、健康與生活保障的技術途徑。
涉及的新技術問題包括:平台安全監測與預警、幽閉環境中人員健康與生活保障(保障數十人在狹小密閉艙室中工作90個晝夜的身心健康)、高外壓環境中人因産物無排放無害化處理、千米潛深整艙應急逃逸(緊湊型應急逃逸艙、逃逸艙與大型平台的大傾角解脫、上浮與水面姿態穩定性、波浪中回收)等。
結束語
海洋裝備技術産業是建設海洋強國的支柱産業。其技術和産業能力的發展狀況決定著一個臨海大國未來的經濟與安全前景。21世紀海洋裝備技術與産業發展的方向聚焦在“智能、綠色、深海、極地”,技術內涵十分豐富。
中國應利用良好的工業和技術基礎,著力發展智能與綠色技術,加快推動船舶産業的“數字化轉型、智能化升級”。“奮鬥者”號載人潛水器的成功研制與海試,標志著中國已具備進入世界海洋最深處開展科學探索和研究的能力。
然而,人類“深海探測、深海開發”的進程方興未艾,應面向海洋科學研究、資源開發和安全保障等方面的需求,加快發展深海裝備技術。同時,關注本文未涉及的極地海洋裝備技術的開發,從而通過努力突破並掌握各領域的關鍵核心技術,體系化發展海洋裝備技術和産業,加快建設海洋強國。