過去幾十年,工業機器人已經大規模應用于工廠車間,成爲生産線上一道亮麗的風景。機器人取代了工人進行各種裝配、搬運、包裝等任務,解決了人力資源緊缺的難題,同時提升了生産效率,以及保證産品的一致性,並降低了成本。
傳統機器人面臨痛點,自適應機器人應運而生
隨著基礎技術的穩步發展,許多行業對現場機器人的需求越來越高,對于一些需要“手眼配合”的複雜工作以及具備不同程度的工藝難度和環境不確定性較高的應用場景,例如複雜裝配和表面抛光,傳統工業機器人難以勝任。
針對傳統工業機器人的不足,業內又推出了可以與人一起協同工作的協作機器人。協作機器人克服傳統工業機器人的缺點,以更高的安全性、簡化部署和易于編程的優點進入市場。但協作機器人爲了實現安全性,通常需要犧牲産品的性能,包括有效負載、速度和精度等等,在工作效率上可能會大打折扣,難以達到市場預期。
非夕科技市場總監高雲帆在接受維科網采訪時表示:傳統機器人和協作機器人的技術路徑,無論是機械結構還是底層的運動規劃和控制算法,其實都是一脈相承的。傳統工業機器人和協作機器人,都存在一定的局限性,特別是無法適應長期接觸式以及複雜手眼配合型的工作。
新一代機器人需要沿著仿人化的路徑進行技術上的革新,超越協作式機器人和傳統工業機器人的水平,解決特殊場景下的應用痛點,爲此,自適應機器人應勢而生。
區別于以往的工業機器人和協作機器人技術,自適應機器人需要的不僅僅是與人協作的能力,更是自身對複雜環境與複雜任務的適應能力。
高雲帆表示,目前可以用一些核心特性來定義自適應機器人,例如位置誤差容忍度高、抗擾能力強、智能可遷移等,但沿著仿人化技術路徑的自適應機器人底層核心技術主要聚焦于兩點:
第一,高複雜度、高精度、高響應的力控技術是奠定一切自適應技術的基石;而要達到類人的力控程度,對于底層的力矩傳感器,關節模組的制作封裝,整機的設計,以及最核心的力控算法要求非常高。因此,自適應機器人是一個全棧式技術創新的産品。
第二, 建立在完整感知能力(包括視覺和力覺)基礎上的層級式智能AI;這是完整發揮力控技術潛力的一座大廈。底層的智能就像條件反射般控制著手臂的基礎運動,中層的智能編碼各種基礎運動的不同序列,而高層的智能負責認知、理解、規劃等等複雜的智能——這樣的智能稱爲“層級式”智能。
高雲帆強調,這兩點缺一不可,僅僅依靠其中的一點不足以讓機器人具備足夠的適應性。因此,自適應機器人的革新必須是自底向上的、系統性的、全面的革新。
搶占行業風口,非夕科技聚焦自適應機器人
在自適應機器人領域,非夕科技無疑是走在前列的。非夕科技成立于2016年,專注于研發、生産集工業級力控、計算機視覺和人工智能技術于一體的自適應機器人産品,爲汽車、3C電子、航空航天等制造行業,以及醫療、零售等服務行業的終端企業提供基于非夕機器人系統的整體、創新性的解決方案和服務,在硅谷、上海、北京、深圳、佛山、新加坡等地區設有辦公室。
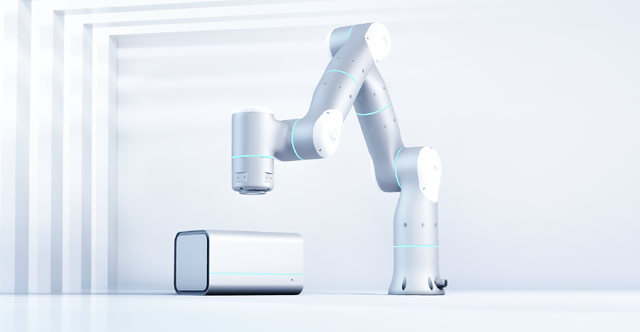
高雲帆表示,由于一直以來硬件的限制,整機力控算法是一個業界少有人涉足的領域。非夕科技推出的世界首台自適應機器人拂曉Rizon,首次將工業級力控、計算機視覺和人工智能技術融于一體,突破了傳統機器人只能在結構化環境中完成基于軌迹的固定任務的局限,可以適應不確定的工作環境,通過像人一樣的手眼配合來完成複雜的工作任務,以此來大幅增強生産過程中的柔性和生産力。

非夕科技主營業務
結合力覺控制及先進的AI技術,拂曉Rizon能夠實現優秀的視覺感知能力、力覺引導控制能力及靈活的任務規劃能力,讓其機械臂能夠在不確定的環境下高效工作。
爲了達到這樣的自適應性,Flexiv自主研發了新型軸關節、關節扭矩控制器、獨有的力覺感知技術以及層級式機器人智能系統。另一方面,通過全面完善的硬件架構設計,Flexiv機器人産品達到工業級標准的安全性,並且在人機交互以及不確定環境下也具備本質上的安全性。
工業方面,Rizon可以完成複雜曲面抛光、裝配、插拔、基于力覺的質量測試等複雜工作,工藝環節得到有效的改善。

拂曉Rizon自適應機器人
值得一提的是,非夕科技提供的一站式解決方案,擁有在不確定環境下有效完成工作的能力,具有很高的通用性。
例如在大部分的工業機器人應用中,機器人需要依靠位置精度來去工作,來料一般會有各種條件的限制,需要額外的一些工裝制具二次定位、整形機構來去把這些物料給規整好。
在核心工藝方面,目前大部分的解決方案的核心工藝其實還是會非常依賴于一些末端的工具,給機器人特殊設計的一些設備,或者是非標專機或工業設備去完成的。
高雲帆表示,自適應機器人對周邊非標治具的依賴度較低,減輕了企業的前期設備投入,同時極大地降低部署成本,讓企業能夠輕松把之前的工作任務移植到相似場景的新生産線上,從而降低總體擁有成本。
自適應機器人産品優勢
立足技術優勢,非夕科技不斷開拓自適應機器人産品生態
高水平的技術領先優勢來自于高水平的研發人才隊伍,談及非夕科技的優勢,高雲帆表示,非夕科技的創始成員均爲來自斯坦福機器人和人工智能實驗室的博士或博士後。
正是有了這樣一支高水平的研發隊伍,非夕科技自適應機器人的軟件系統100%是自主開發,新型傳感器、機器人關節驅動器、伺服控制器等90%以上的核心硬件也是自主研發,目前非夕科技的自適應機器人已經申請逾百項專利,其中70%以上是核心技術專利。
在自適應機器人生態建設方面,目前,非夕科技針對潛在的通用智能機器人生態夥伴開放多種賦能和合作方式,如官方授權、聯合推廣、渠道激勵和特定項目推進等,通過靈活主動的權益政策,加速生態夥伴的業務落地和增長。
對于整個行業來講,自適應機器人目前還屬于新鮮事物,如何破解目前在市場推廣方面遇到的困難,高雲帆表示,從産品設計和技術層面來看,自適應機器人跟其它機器人産品存在較大的差異性,整套産品是系統性、多維度的技術創新,非夕一直在結合市場需求,不斷升級叠代自適應機器人系統的綜合性能。不管是對機器人行業從業者還是對廣大客戶來講,都建議可以主動去轉變底層應用思維,以開放的心態給自適應機器人更多的應用嘗試。
對于自適應機器人的未來,高雲帆表示非常看好。隨著勞動力成本的不斷上升,工業自動化進程的加速,自適應機器人將會運用到更多的新藍海應用場景。非夕科技也將積極開拓市場,擁抱更多産業機遇。