從産品體驗和設計思路看,我更願意叫Reno4是真正的Reno4,而Reno4Pro叫Reno3 Ultra更合適一點。如果沒耐心看這篇文字,只關心配置的話,我簡單點總結:
1. Reno4 Pro就是基于Reno3 pro的總體設計,加入了新的配色和AG工藝,升級到FindX2標准版的影像系統和65W充電系統的版本。
2. Reno4則是全面修正Reno3外觀的和感知的錯誤,相對Pro做了一些必要的簡配的産物。它和Pro之間的差距不像前代那麽巨大,表現也更加穩健。
如果你想聽我說點不一樣的,那就從Reno3Pro的作用和Reno4Pro的傳承開始聊。後面我會簡單談談實際的産品體驗。
承前啓後的Reno4Pro
在Reno3 Pro之前,很多廠商都想把手機搞的輕薄一點。這兩天,我聽說有個大廠的老板,因爲2019年全年的産品都是板磚形的,把産品經理罵了個遍,今年新品全面回歸輕薄。而最近發布的主力産品,超過一半的機型選擇了輕薄路線。但輕薄總是有代價的,SOC、影像模組、電池不可能之三角悖論。
Reno3Pro的出現,讓幾乎所有的廠商開始考慮,能不能挑戰這個不可能三角,解決不了也沒關系,盡可能提高這三大因素的底線行不行?比如三星不就做到了輕薄和性能體驗共存嘛。于是乎,我們今年看到了對Nova6系列設計推翻重來的Nova7和榮耀30系列;看到了OPPO的Reno4系列;也看到了後續vivo的X50系列。
整個産業的殊途同歸,是對去年板磚流的一次集體反思,而大家選擇不太拉胯的組件構建新的輕薄流産品,則是對今年消費趨向的引導。
從這個意義上來說,Reno4系列,是對Reno3系列不足的補全,也是對主流性能下輕薄的探索的一次繼承。在Reno3Pro的基礎上,彌補了不少遺憾(盡管SoC的性能還是原地踏步)。
Reno4系列是一款線下機,線下機的基本邏輯還是賣相、品牌、服務和價格體系的綜合效果。今年的市場挑戰很大,Reno4作爲一個查漏補缺,但略微缺乏大改進的的産品型號,是否在線下能靠顔值、屏幕、快充和防抖視頻這些賣點取得實戰效果,還得交給市場驗證。
Reno4 Pro實際體驗:Reno3Pro的Ultra版,FindX2的Value版

上圖是Reno4Pro、Reno3Pro和FindX2的合影。FindX2玻璃版是8mm的厚度,7.6mm的Reno4Pro依然能感覺到厚度上的細微落差。鏡頭模組的外觀設計方面,繼承了OPPO家垂直縱置的大體設計,配色有了巨大的調整。從Reno3Pro的黑色色塊調整爲三枚鏡頭獨立放置,配以半透明的接近後蓋色的玻璃基板。這麽做的始祖是蘋果,曾被機圈恥笑爲:凸起再凸起。凸起再凸起不過只是視覺上的感覺,實際尺寸並沒有凸起再凸起。

配置方面,我開頭就說了,整體和Reno3Pro基本一樣,而影像模組完全繼承了FindX2那套,超廣角采用的是一顆16:9比例的CMOS,索尼IMX708,1/2.4英寸,比1/2英寸的IMX586小一點,但是比日常使用的1/2.8英寸IMX350要大。原生直接輸出16:9規格的1200萬像素照片,最大光圈爲F2.2。主攝鏡頭爲打磨了一年多的OISIMX586 F1.7,這顆主攝的表現我拍過很多樣張,個人非常滿意。2X長焦鏡爲1300萬像素CMOS,結合主攝進行5X的混合計算成像。之前FindX2系列評測,我談IMX689和IMX586比較多,今天這篇文章,主要會展示一下IMX708的性能。
在性能指標上,Reno4Pro和Reno4最大的亮點就是標配了65W的SuperVooc 2.0閃充,4000毫安時電池,極耳前置方案,36分鍾即可充滿。這是OPPO首次把自家目前最強的充電技術放到線下主力産品上。
SoC和基帶指標,依然使用骁龍765G芯片,內置X52 5G基帶。這款芯片的性能和基帶能力都談不上上乘,但是ISP的表現相對比較穩健,盡管AI測試成績不是太高,但滿足這套模組的需求還是足夠了。Reno3Pro已經證明了它那套影像系統在765G上是可以玩轉的。
簡單小結一下,Reno4標准版相對Reno3是天翻地覆的變化,起碼不會搞個塑料中框和水滴屏了;Reno4Pro則是Value版本的FindX2,差別主要在于采用COP封裝的90Hz的FHD+三星柔性AMOLED屏幕和骁龍765G芯片。那麽,一個好玩的問題來了,如果Reno4 Pro采用骁龍865芯片組,你會選擇Reno4Pro還是FindX2呢?
影像系統簡評:令人信服的色准表現,和FindX2如出一轍
如果你對FindX2的影像系統心裏有數的話,那這部分基本可以跳過。如果你手上有Reno3Pro,那我建議你關注這部分關于超廣角的成像質量,其他基本一模一樣,沒有什麽區別。影像系統簡評使用的參考手機是FindX2 Pro(IMX689主攝、IMX586超廣角)和FindX2標准版(Reno4Pro同款模組)。
在主攝色彩對比上,我會用Reno4Pro和兩款FindX2去比;在成像細節上,主要用Reno4Pro和FindX2Pro去比,看看差距和差別在哪裏。
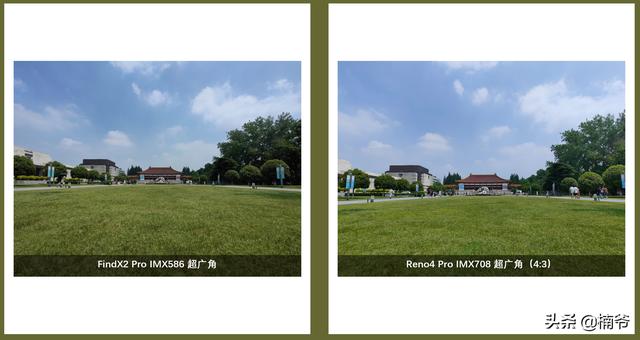
需要說明的是,IMX708本身是一顆16:9畫幅的CMOS,如果按照4:3出片的話,機身會裁成約900萬像素的照片。而IMX586的4:3畫幅是1200萬像素(1.6μm)。從實際表現來看,FindX2Pro的整體色彩偏素(後面對室內文物基色的表現也基本證明這一點),而Reno4Pro(也包括FindX2)的整體調校則積極一些。這兩者在白平衡和色溫上的主要硬件區別在于FindX2Pro有一顆色溫傳感器且,理論上FindX2Pro的判斷更值得信任一點。實拍下來,如果以肉眼爲主要標准來看,FindX2Pro在綠色的的反饋略微保守,而Reno4Pro則比較積極。
在關鍵的解析力看,100%細節放大我並沒有發現兩者存在肉眼輕易可以辨認的差距,也就是說IMX708的解析力在IMX586面前並不示弱。目前超廣角選型裏,IMX586、IMX608的4000萬像素級爲第一層級,那麽IMX708當之無愧可以成爲第一梯隊略往下一點的水准,好于主流的IMX350。

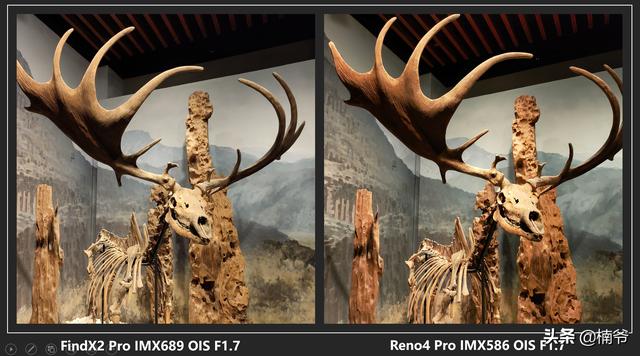
Reno4Pro、FindX2和FindX2Pro在室內射燈的幹擾下,都可以消除LED燈的頻閃幹擾,對色彩做出各自的判斷。這三張圖,最符合原貌的其實是FindX2的色彩表現,准確到讓我驚訝。而FindX2Pro則素雅一些,而Reno4Pro活潑一些。至于討喜度,見仁見智,畢竟還原是客觀的,喜愛是主觀的。
FindX2 Pro的5X成像有兩種模式,在一定對焦距離內,會使用IMX689強行裁切,也就是所謂的長焦微距模式。Reno4Pro則使用主攝和2X中焦鏡進行長焦微距的混合成像。之前我對IMX689的評價是2X裁切還不錯,強行裁切5X可能有點勉爲其難。在這組樣張裏,這倆照片都沒如實反饋當場的顔色,IMX689依然是色溫糾正,偏淡;Reno4Pro則偏濃郁一點。關鍵的成像細節,Reno4Pro的5X混合,在暗光下拍攝的細節要好于IMX689強行裁切。
靜態影像部分,我的總結如下:
1. Reno4Pro能提供一個目前一流水准的16:9規格的超廣角模組,和IMX586直接PK不落下風。
2. 相對FindX2Pro,Reno4Pro缺失了獨立的色溫傳感器,保留了激光對焦系統。室內拍攝,Reno4Pro不像其他競品那樣出現各種奇奇怪怪的色溫偏移,反而是盡可能的還原了本質。而它的大哥FindX2Pro則積極調整白平衡,使之看上去更自然。
3. 其他部分,比如潛望鏡5X對比混合變焦的5X,大太陽底下色彩表現差異不大,細節上還是潛望鏡略好點。暗光下FindX2Pro對潛望鏡做了一定的優化,比混合變焦無論在對焦速度,還是成像清晰度都要強一些。
4. Reno4Pro和同模組的FindX2在色彩表現並不完全一致,就我個人來說,當前更喜歡FindX2的調校策略。當然這倆調成完全一模一樣是沒有問題的,就看OPPO怎麽想了。
總結一下:
從産品力來說,Reno4Pro在輕薄的機身下提供了一個性能削減,其他部分類似FindX2的解決方案,配合新的機身工藝和65W充電,去承擔接下來一段時間OPPO線下主力銷售的任務。
這個任務一點都不輕松,同期競品太多,各種花裏胡哨的功能和玩法,都會讓Reno4系列面臨巨大的挑戰。實際體驗看,Reno4Pro屬于沒什麽毛病的那種,你要非擡杠說完全沒創新也沒啥,畢竟其他廠也都在各種換殼技術下放什麽的,對吧。
産品,我很喜歡;銷量,交給消費者拿錢投票去吧。