Spot 機器狗是著名機器人公司 Boston Dynamics(波士頓動力) 最廣爲人知的産品之一,也是該公司探索將先進的機器人技術商用化的第一款産品。
2019 年下半年宣布商用不到 8 個月,現在,Boston Dynamics 爲其升級到了 2.0 版本:軟件功能的更新頗具亮點,硬件上的改進主要體現在處理濕滑的表面上有了更好的表現,而且對樓梯有了更好的理解(樓梯一直是腿足機器人的一大困難場景)。
(來源:Boston Dynamics)
根據 Boston Dynamics 官網對于 Spot2.0 的介紹,該産品現在具有更高的自主性,同時在通信、導航、有效載荷等功能上都有提升,並且更便于開發人員進行編程。
Boston Dynamics 一直表示,Spot 會被打造成一個模塊化的平台産品,而不是只能在單一的場景下解決特定的任務。
正如此 Boston Dynamics 創始人 Marc Raibert 在接受 DeepTech 采訪所表示:“我們要從技術研發公司變爲産品公司,Boston Dynamics 目標是成爲機器人界的 Android”,通過開放應用程序編程接口,合作夥伴可以在 Boston Dynamics 的産品中加上自己開發的應用,擴充機器人多樣功能。比如讓使用者能夠增加硬件及軟件,也就是通過實體的串連設計,使用者能夠在機器人上增加各種他想要的功能,比如攝像頭、無人機的 landing Pad 等。
從 2.0 版本的更新來看, Boston Dynamics 正在朝著該目標加速邁進,而且看得出來,這家以硬件上的動力學表現一騎絕塵的公司,在考慮商業落地之後,對軟件的重視程度又有上升。

圖丨 Spot 是波士頓動力第一個平台化的産品(來源:DeepTech)
5 大更新,自主導航成亮點
Boston Dynamics 列出了 5 項更新重點,分別是自主導航 API、移動性能、有效載荷、平台和其他擴展的開發人員功能。
自主導航 API 聽起來或許沒有讓機器狗更好地爬樓梯那麽令人興奮,但極大擴展了 Spot 的自主導航能力,與 Boston Dynamics 讓 Spot 完成商業應用的願景一致:Spot 的應用場景將包括借助其強大的四足系統自主巡邏或者遞運貨物。
自主導航 API 的更新涉及兩個部分,一個是名爲“GraphNav API”:在此前版本中,該功能稱爲 Autowalk,但在 2.0 版本中,開發者可以訪問 Autowalk 背後的高級自主導航行,並跟蹤機器人在較大範圍找那個的位置。開發者還可以自主記錄、編輯地圖並將其上傳到導航系統中。
(來源:Boston Dynamics)
另一個部分則是“Missions API”:此 API 用于對自主操作進行開放性編程,Missions API 能與 GraphNav API 一起使用,將以允許用戶實現更高的代碼集成度,可用于自定義傳感器和命令源。
Boston Dynamics 的首席機器人工程師 Zack Jackowski 對外媒 IEEE Specturm 表示:“我們對 Spot 的願景一直是將其打造爲移動平台。Spot 所做的就是可靠地將用戶關心的貨物送達目標位置,隨著這個自主導航 API 的發布,我們終于實現了這件事。”
到目前爲止,Spot 的自主性仍然基于一定程度的人工強化和複現上。用戶需要先通過手動操作(通過平板電腦和操縱杆)驅動機器人,Spot 才能夠記住並自主導航該特定路線,如果在自主導航過程中出現了新的障礙,需要對 Spot 進行重新規劃。
這個優勢既會使 Spot 與其它機器人平台區分開來,但是即使是對于有經驗的用戶來說,進行這種設置也不是一件容易的事。
對此,Boston Dynamics 創始人 Marc Raiber 表示:“我希望在大家眼中我們是一家移動平台公司,這也是我們對自己的定位。但隨著我們最近在 Spot 上做的這一輪工作,適用範圍已得到擴大,這種移動性更容易獲得。”
這款機器人現在還可以通過基于決策樹進行編程,以便用戶可以將導航、感測和動作命令組合爲一系列有用的行爲。2.0 更新不僅讓 Spot 具備了負載的能力,還提供了幾種將有效載荷與機器人智能集成的方法,從而使系統具有更強大的功能。
“我們正在嘗試做無聊的事情”
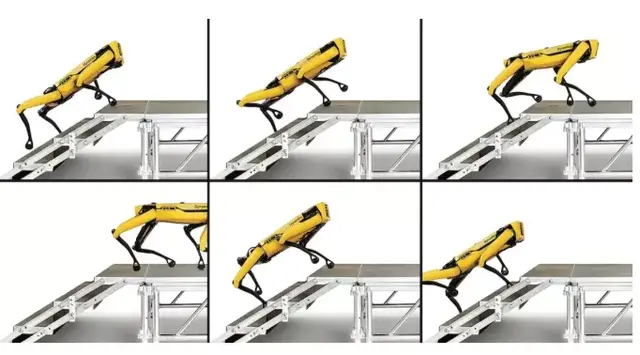
Spot 2.0 版本還包括一些重要的運動能力升級,可以幫助 Spot 在光滑的表面上更具靈活性,並且能夠上樓梯,這對于 Spot 在其第一個商業部署環境——建築工地——是很好的提升。
一些建築工地有著非常光滑的高度抛光混凝土地板。如何在這種地面上避免滑倒或者滑倒後自行恢複,一直是 Boston Dynamics 試圖解決的問題。
圖丨 BigDog 在冰面上(來源:Boston Dynamics)
“事實證明,機器人身處建築工地時,不能只是四處張開腿,” Jackowski 解釋說,“人類滑倒時,人類需要認清自己正在滑倒,在你的腿還沒滑出之前,你已經要滑倒。”
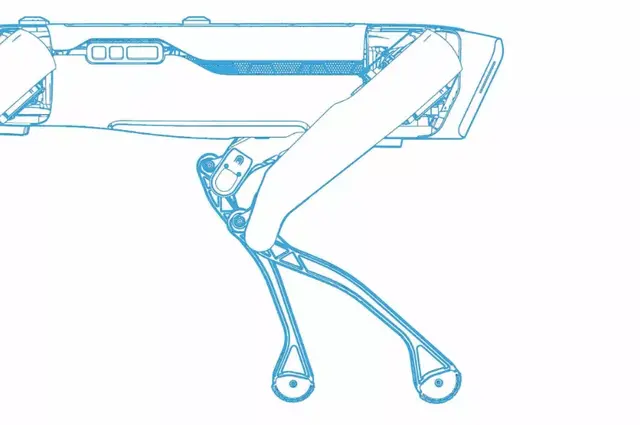
對于機器人來說,理想情況下,機器人應該能夠理解它正在行走的表面的類型,並調整其移動方式以最大程度地減少滑動。但這一點特別棘手,因爲 Spot 的 “小腿” 沒有電機或傳感器,但是現在控制系統可以在管理濕滑表面的同時,將滑倒幅度降到最低。
在爬樓梯的表現上,Spot 2.0 現在可以將樓梯准確識別爲樓梯,而非怪異的山丘,並應用一些基本的語義知識來估算樓梯幾何特征,從而使樓梯攀爬更加安全和可靠。例如,Spot 現在明白了樓梯通常會有規律地間隔開來,這意味著它可以將樓梯模型擬合到其映射和傳感器數據中,並且可以更好地判斷腿部的安全放置位置。
Raibert 認爲,對樓梯處理能力的改進還將幫助 Spot 應對一些對于機器人來說頗爲棘手的樓梯,特別是 Spot 的傳感器還難以識別的帶有格柵的樓梯和開放式樓梯。
從此前炫技式的後空翻到僅僅關注到爬樓梯這一尋常動作的諸多細節問題,Boston Dynamics 顯然想要讓作爲首款商用産品的 Spot 在商業使用上更接地氣一些。
圖丨此前 Atlas 令人驚豔的後空翻(來源:Boston Dynamics)
Raibert 說:“我們真正專注于開發能夠可靠地執行常規任務的機器人。” Jackowski 也表示,這聽起來不是最令人興奮的目標,特別是考慮到 Boston Dynamics 最爲人所道和最擅長的技術,但與後空翻相比,這個目標更困難也更重要。
“我從加入到 Boston Dynamics 開始,從事了很多非常酷的動力學研究工作,但是從機器人産業的角度來看,讓機器人産品發揮作用並真正具有實用價值所涉及到的問題同樣有趣,而在許多情況下更具挑戰性。”
Raibert 也同意這一點。“公司的曆史就是嘗試做不無聊的事情,但我們正在挑戰這個新的方向——做無聊的事情,結果可能也是無聊的,但這正是人們的需求。(Our history is to try and do anything but be boring, but we’re trying to do something new for us—to do boring stuff and have the result be boring, because that’s what people need.)”
但他也強調,Boston Dynamics 會繼續從事先進並且酷炫的研究,只不過這些不會是 Spot 2.0 的重點。
下一步: Spot 擁有頭戴式手臂
根據 IEEE Specturm 的報道,Spot 接下來的一個醒目改動,將是在自己的頭上加一個手臂。

(來源:Boston Dynamics)
圖丨機器狗開門(來源:Boston Dynamics)
Raibert 預計頭戴式操作手臂版本的 Spot 將于今年某個時候上市,這將使各種瘋狂的新應用成爲可能。此前的機器人曾經在視頻中演示過開門的用途。
“操作手臂會帶來許多新的功能和特性,而且難度不小。我們正在爲此努力,特別是軟件部分會很酷,其中一些功能將通過雲端 AI 來實現”,他說。
“我希望將機器人提供給任何人,” Raibert 說。“我們現在的目標之一就是找出哪些它可以做,哪些它做不了,不僅會面向成熟的領域和客戶,例如檢查煉油廠或發電廠,而且還會開拓更多的可用性。”
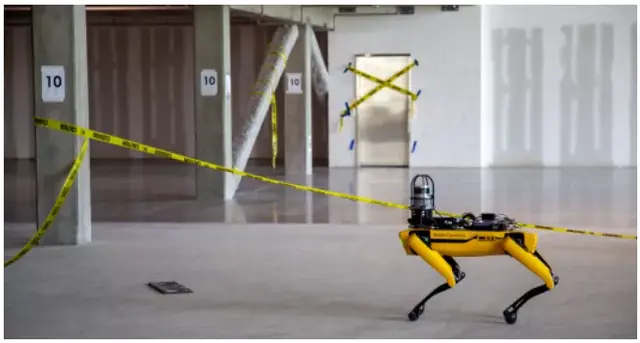
圖丨 Spot 用于監控建築工地(來源:網絡)

圖丨 Spot 宣布商用之後增加了戶外拉車的技能(來源:網絡)

圖丨 10 只 Spot 拉動卡車(來源:網絡)

圖丨新冠疫情期間,新加坡碧山宏茂橋公園的Spot會巡邏兵反複播放保持適當社交距離的提醒(來源:網絡)
不過到目前爲止,我們仍然不知道 Spot 的價格。Raibert 唯一透露的是:“我們正在努力降低成本”。
現在,由于新冠疫情的爆發,大約有 35 個 Spot 被 Boston Dynamics 的工程師帶回家中,以繼續在新冠肺炎疫情期間保持生産和測試。