就像自動駕駛汽車正在公共道路上行駛一樣,機器人船也被視爲一種可行的水上選擇。麻省理工學院 (MIT) 剛剛推出了全尺寸的先進Roboat,展示了它在阿姆斯特丹運河上的能力。

設計和自主技術的融合
麻省理工學院的計算機科學與人工智能實驗室(CSAIL)和可感知城市實驗室自2015年以來一直在研究這個項目,過去幾年已經推出了幾款原型。現在,最後一款機器人船下水:Roboat看起來很有未來感,采用黑色和灰色的時尚組合,兩側有橙色字樣,並且性能得到了改進。

在阿姆斯特丹先進都市解決方案研究所(AMS)的露天實驗室裏,研究人員成功地測試了最後的Roboat原型,這是一艘裝有Torqeedo電力驅動裝置的自主機器人船。未來氣候友好型城市的流動革命將包括運送人員、産品甚至垃圾的新方式,同時可用于水利基礎設施調查,以及水質監測。不久,Roboat就可以協助阿姆斯特丹的垃圾收集服務,進而改變世界各地的城市。

載人版和垃圾運輸版
據麻省理工學院的專家稱,有四個主要套件不同于“普通”船,是專門爲Roboat開發的。首先、這種水上機器人船在感知、航行和控制方面具有更高的精度和穩定性。爲了實現自主航行和無碰撞,Roboat使用了激光雷達和360°視野的傳感器和攝像頭。這些傳感器被稱爲”感知套件”,使Roboat能夠學習和理解周圍環境。

爲了自動確定自由路徑,Roboat使用激光雷達和攝像機,使360度的視角。這個“感知套件”讓Roboat了解它周圍的環境。
當Roboat感知到一個像獨木舟一樣的新物體時,算法會將該物體標記爲“未知”。稍後,監測團隊便會查看數據,手動選擇該對象,並將其命名爲”獨木舟”。該算法正逐漸被訓練得比人眼更快、更准確。在GPS的幫助下,它甚至可以自主決定從A點到B點的安全路線。

Roboat 自動響應水上物體

傳感器
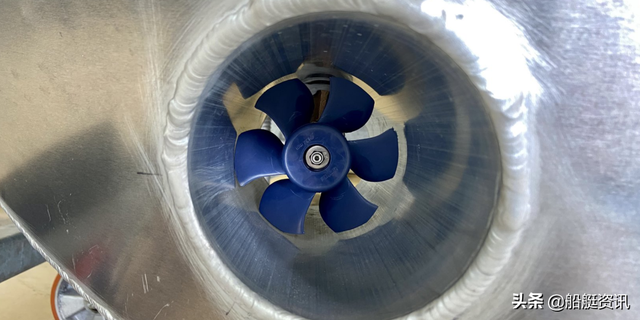
其次、這款自主船也是全電動的,每艘Roboat都配有四台Torqeedo電動推進器,可以讓Roboat向各個方向移動,甚至橫向移動。由于電動發動機集成在吊艙內,推進器不需要任何內部空間,同時也更容易更換。
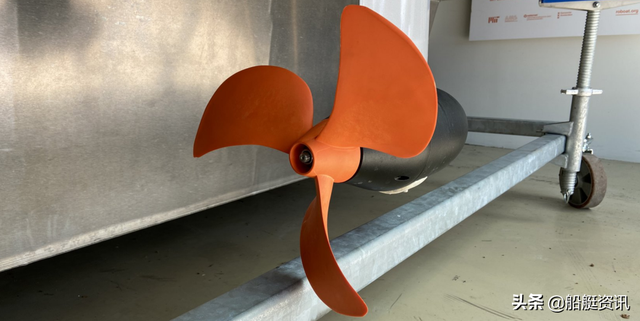
Torqeedo主電動推進器
每艘船配備一套“箱子大小”的12kW LiFePo電池組,該電池由贊助商Murata開發,可以連續運行10個小時。這種電池可以在完全集成在運河邊的無線充電站自行充電,這是設計思維的另一個獨特結果。

12kW LiFePo 電池
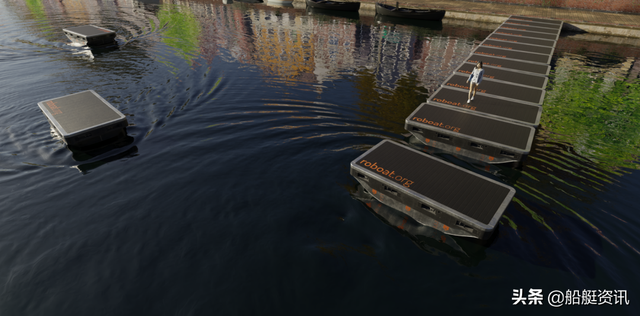
Roboat另一個令人印象深刻的創新是它的“鎖摳系統”,在檢測到特定的二維碼時,系統會引導它到碼頭或其他船只。例如垃圾運輸版可自動鎖在垃圾點用來收集垃圾,通過該系統還可與多個Roboat單元連接,形成臨時橋梁以緩解交通,以及浮動平台和廣場,這在上次叠代中是不可能的。

垃圾運輸版自動停靠在某個垃圾點

有了鎖扣系統,可以更容易泊船,也很方便在一個專用的Roboat對接站給電池充電。
第四個有趣的特點是它的通用船體即模塊化,這意味著各種類型的頂層甲板都可以適應這個保持不變的平台,這要歸功于一個多用途的設計。

自主垃圾船概念設計

船體由Stormer Marine建造

Roboat的模塊化船體:垃圾運輸模塊
Roboat已經如此先進,以至于該項目的下一階段已經准備開始——它的商業化。Roboat加入阿姆斯特丹垃圾收集服務的行列似乎只是時間問題,客運運輸部署也在計劃之中。“在Torqeedo,我們看到了巨大的潛力。電氣工程和自動化的結合提供了巨大的機會,”德國船用電力驅動系統供應商Torqeedo的應用工程師Lukas Timcke表示。

客運版
在允許Roboat在阿姆斯特丹運河上航行之前,還有一些法律問題需要澄清,但AMS項目協調員並不擔心:“我們正與阿姆斯特丹當局密切合作。荷蘭正在積極地與研究人員和企業就城市地區的氣候友好型創新進行對話。”

荷蘭人不僅善于在不同的利益相關者之間找到共識,他們也面臨著采取行動的巨大壓力。荷蘭四分之一的土地位于海平面以下,其地理位置迫使該國先行研究先進的解決方案——而不僅僅是在海平面開始上升之後。
在早期,阿姆斯特丹的運河被廣泛用于運輸貨物和人員,但這在20世紀變得不那麽重要。如今,主要是觀光客在grachten旅行——純粹是爲了消遣。但隨著世界各地的城市中心人口越來越多,規劃者認識到利用水路緩解街道擁堵的潛力。Roboat的目標是重振這一潛力。

Torqeedo公司的 Lukas Timcke 表示:自主電動船將能夠解決現代城市的許多問題。” “有許多應用領域。這種無排放、節省空間的技術可以節省大量成本和時間。貨物交付、公共交通和數據收集是潛在的應用。”

水質監測版
任何認爲這聽起來像是遙遠的未來場景的人,只需仔細看看阿姆斯特丹正在發生的事情。這座城市是未來水上電動交通的現場實驗室,也是第一個追求“甜甜圈經濟”模式的城市之一。由英國經濟學家凱特·拉沃斯(Kate Raworth)提出的甜甜圈經濟學定義了可持續經濟的條件。經濟活動的範圍是由現有的生態和社會邊界決定的,可視化看起來像一個甜甜圈。
阿姆斯特丹的副市長Marieke van Doorninck正朝著這個方向推動城市的改造。她的目標是建立循環經濟和自給自足的資源。“甜甜圈經濟學的偉大之處在于,它提供了一個生態和社會目標相一致的綜合框架。從2030年起,阿姆斯特丹的運河將只允許電動船艇通行。到2050年,這座城市希望在外部資源方面能夠自給自足。

這位市長似乎決心讓她的城市更宜居。Roboat在這方面可以發揮非常實際的作用,因爲燃燒驅動的垃圾車在舊城狹窄的街道上造成交通擁堵,排放出肮髒的廢氣,並破壞運河沿岸的曆史橋梁和建築物。
阿姆斯特丹的基礎設施始建于 17 世紀,並不是爲應對擁有 80萬居民以及每年湧入的多達 2000 萬遊客的現代城市所面臨的挑戰而設計的。城市空氣質量也需要從根本上改善。歐洲公共衛生聯盟 (EPHA) 委托荷蘭著名研究和咨詢機構 CE Delft 進行並于 2020 年發表的一項研究結果表明,即使大城市的出行行爲發生微小變化也能産生巨大影響。

Carlo Ratti 是波士頓麻省理工學院的教授,他是可感知城市實驗室的負責人。
AMS 的 Roboat 研究負責人兼聯合創始人 Carlo Ratti 是塑造未來城市的開發專家,也是該項目背後的偉大思想家。他畢業于建築和工程專業,現在是著名的麻省理工學院 (MIT) 的教授,同時兼任設計師和企業家,往返于紐約、新加坡、波士頓和都靈之間。他將自己的專業知識用于解決一個問題:面向未來的可持續城市概念。
“我們今天在這裏看到的是大量思考的結果。在五年的時間裏,我們進行了研究,進行了試驗,建造了原型。很高興看到Roboat真的能工作。這是我們的孩子,”這位50歲的意大利人說。最終,Roboat不僅能運輸垃圾或貨物,還能像小型渡輪或水上的士一樣運送人員。

在用于收集垃圾的 Roboat“Crystal 2” 旁邊是“ Lucy 1”,它是運送人員的原型 – 可容納五名乘客。可以開始在試驗池中進行露天試運行。Roboat 以驚人的速度加速並以敏捷的方式操縱。這次旅行愉快而平靜,在水上稍作休息,美好而輕松。
Carlo Ratti 補充道:“這還不是全部。“你可以把Roboat看作是一個浮動的像素,是城市建築的一個動態元素,你可以用它來建造一座橋或一個浮動的舞台。畢竟,幾艘Roboats可以通過橫向鎖扣系統連接在一起。如果你把一個城市的水納入你的思維,一種新的城市基礎設施就出現了,阿姆斯特丹的水路畢竟比道路還多。”

任何試圖在阿姆斯特丹狹窄而擁擠的運河中操縱動力艇的人都知道,要“小心前行”。但 Carlo 並不認爲阿姆斯特丹人會懷疑與自動駕駛船共享他們的運河:“在新加坡最近對自動駕駛汽車進行的測試中,我們看到,一旦人們有機會親自嘗試這些新事物,他們就會對這個想法持開放態度。所以我們要讓人們和我們一起踏上征程,讓他們了解技術。我們必須展示這項技術。”

Carlo 指出,威尼斯、迪拜和斯德哥爾摩等其他城市也對 Roboat 感興趣。越來越多的市長決定實現甚至超越歐盟的氣候和能源目標。來自53個國家的近11,000個城鎮已經加入了全球氣候與能源市長公約,而且這個數字還在不斷增加。我們的氣候和城市都充滿希望。像 Roboat 這樣的項目正在向我們展示前進的道路。

據項目代表稱,這艘自動駕駛船可以輕松地 100% 7X24小時自動運行。盡管如此,出于安全原因,目前由陸上運營商對其進行監控。
在公布最終版本後,該項目的下一階段將開始在阿姆斯特丹的公共航線上運營這款自主船。此外,一名操作員可以安全地監控多達50艘這種機器人船,這對社區和環境都是非常有益的。