
▲蘋果官網對iPad Pro激光雷達組件的介紹
“激光雷達”這兩年更多被提到是在自動駕駛領域,所以看到蘋果把激光雷達裝到了iPad裏的消息,很多人的疑問是,激光雷達不是長得“那麽大”,多用在自動駕駛汽車、掃地機器人上的嗎?難道是蘋果偷換了概念?

▲利用iPad Pro的雷達系統實現增強現實功能
據了解,應用在iPad Pro上的dToF激光雷達,只是一個開始,iPhone或許很快也會用上,很有可能就在今年,早在兩年前蘋果就讓工程師研究後置三維深度相機。
從2017年首次推出ARKit,蘋果一直在探索AR在移動終端中的應用,這次dToF激光雷達的加入是其繼結構光鏡頭模組之後在硬件上圍繞AR應用的又一次重要革新,蘋果的做法到底有什麽不同,背後又牽涉到哪些技術和供應鏈,通過與多位從業者的交流,我們來扒一扒iPad Pro激光雷達葫蘆裏賣的什麽藥,以及背後又蘊藏著蘋果怎樣的AR野心。
一、iPad Pro裝激光雷達,老賣點還是新變革?
說到激光雷達,很多人會聯想到自動駕駛汽車。激光雷達以接近真實的方式構建周圍的三維地圖,從而使汽車“看見”其它汽車、樹木、道路。
自動駕駛領域的激光雷達公司RoboSense聯合創始人兼COO Mark告訴智東西,完全是兩回事,車載激光雷達主要保障安全,識別距離遠,性能要求高;相比于男士錢包大小的車載激光雷達,iPad Pro上的激光雷達可識別數米,探測標准不同,成本也更低。
根據Mark的推測,新版iPad Pro背部的激光雷達大概率采用的是Flash方案。固態激光雷達目前大致形成了三種技術路線:MEMS(微機電系統)、OPA(光學相控陣技術)與Flash(快閃)。按照專業認知,其中MEMS和OPA均爲掃描式,而Flash爲非掃描式。簡單說,Flash就是快速直接發射一大面光牆,從而通過飛行時間法獲知深度信息,某種意義上,它類似于夜視攝像機,不過光源是自己主動發射出去的。
既然沒機械式的“掃描”動作,那麽蘋果官網上爲什麽宣傳“雷達掃描儀”?相比于其它兩種技術路線,Flash不靠活動的機械部件,而是靠電子部件發出的數字信號來控制激光發射角度。因此,蘋果宣傳頁面中的“掃描”可能是描述了具象的感知過程,而不是機械運轉。

▲OPPO R17 Pro的ToF模組
TOF(Time of Flight)譯爲飛行時間法,是一個包羅萬象的術語,指的是通過光、氣體、液體等粒子的速度計算距離的一種技術,已有一百多年曆史。早在1887年,邁克爾遜就首次提出將光波作爲測量長度的尺子。20世紀60年代,激光的發明讓“以光測距”成爲現實。

▲用三星Note10系列手機進行三維建模
除此之外,蘋果只說了測量距離達五米,這不是很遠,同時5m內的識別效果怎麽樣,抗幹擾性怎麽樣?都還不知道,相信産品開賣後,用戶會有直觀體驗。
由此我們可以看到,蘋果iPad Pro上的dToF方案和之前安卓手機上用過的iToF方案以及車載激光雷達有這些異同:
1、三者都用到了光學傳感和ToF距離計算方法。2、iPad Pro的dToF方案相比車載激光雷達,前者是固定的平面3D傳感器,後者是旋轉的單線或多線;同時Flash這一方式在車載應用中有感知距離短的問題,在蘋果設定的場景中則正合適。3、iPad Pro的dToF方案相比安卓機的iToF方案,發射的脈沖信號不同,因而傳感器組件、算法也都有差異。
下面我們對dToF和iToF的差異做進一步的拆解。
二、一顆進化版的ToF相機,有何技術玄機?
雖然都是ToF測量方法,但是蘋果這次用的是dToF 直接測量飛行時間法(direct time of flight),有別于華爲Mate30、Vivo NEX等機型中的iToF 間接測量飛行時間法(indirect time of flight)。
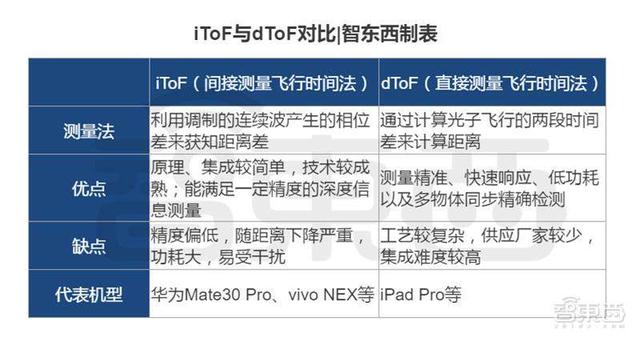
▲iToF與dToF的測量法示意圖
從圖表可以看出來,dToF相比于iToF在性能上要好很多,但在生産工藝上也更複雜。
由于采用dToF方法,iPad Pro背部的激光雷達將能解決直接測距面臨的低時間分辨率難題,達ps(皮秒)級時間分辨率,精度也不會隨距離拉遠有大的衰減。換句話說,iPad Pro的ToF相機性能將提升的不是一點半點,它帶來了一顆進化版的ToF鏡頭,AR體驗的精准度、流暢度將大大提高,功耗也會大大降低。
▲SPAD單光子雪崩二極管元件的功能特點示意
既然關鍵零件的小型化這麽難,蘋果又是如何做到的呢?有分析人士認爲蘋果是將專門用于感光的雪崩二極管和數字電路部分完全獨立制造後進行晶圓級縫合而成,看來這極有可能又是蘋果倒逼供應鏈技術進步的一個例子。
三、誰會是iPad Pro激光雷達背後的贏家?
那麽iPad Pro的激光雷達背後的産業鏈供應商是誰?會是爲蘋果提供Face ID技術的Lumentum嗎?Face ID同樣采用三維視覺技術獲取人臉深度信息,但其采用的是結構光三維視覺技術,與ToF、RGB雙目視覺是三種不同的技術方向,與iPad Pro上的激光雷達-ToF方案也有區別。
同時,據外媒Fast Company上周報道,Lumentum公司表示還沒有和蘋果探討在未發布設備中使用其三維視覺技術。
爲iPhone 7 Plus提供傳感器的意法半導體(ST)參與了嗎?該公司是全球首家提供基于SPAD技術的公司,目前也沒有回應。
另據了解,蘋果公司曾在2019年獲得了一項“Light Detection and Ranging Sensor”的授權,其中提到的Trilumina也可能參與了iPad Pro的激光雷達設計。
一位激光雷達産業鏈資深專業人士分析認爲,iPad Pro背部雷達SPAT傳感器的供應商無外乎索尼(Sony)、意法半導體(ST)、LG innotek等幾家公司。據推測,新版iPad Pro很有可能采用了索尼的背照式堆疊技術,采用LG在韓國大邱的攝像頭模組工廠制造,才將激光雷達濃縮到如此小的空間裏。
有沒有國産玩家在內呢?該專業人士稱,國産Sensor還要很長一段路要走,國産模組、鏡頭則在准備一段時間後會陸續進入。還有業內人士透露,之前聽産業鏈消息說蘋果到2021年才可能推出dToF,目前來看,國産手機可能要兩年後才能做到這種程度。

▲利用AR進行導航
總體來說,這些應用都不夠硬。而在人臉解鎖、手勢識別相對硬核一些的應用上,ToF激光雷達方案其實很容易被毫米波雷達、結構光三維視覺等方案替代。
“應用乏力”問題直擊ToF三維視覺技術的“切入點”和“落腳點”。如果三維視覺應用需求“硬”不起來,激光雷達也好,ToF相機也好,都是科技圈換了馬甲、一年一更新的營銷賣點罷了。
但是,跳出來看,蘋果會不會是在醞釀什麽別的驚喜呢?很有可能。
蘋果爲什麽選擇在Pad上最新推出ToF相機?有人說,可能模組還沒發小到能集成到手機上。
但是,上周,外媒Fast Company報道今年至少有一款iPhone會在背後安裝ToF三維深度攝像頭。據稱,iPhone的工程師們已經花了至少兩年的時間研究後置三維深度相機,而更輕巧便攜的AR眼鏡也已經在路上。
除了技術上,蘋果自身也在推進AR應用的開發和賦能。早在三年前,蘋果就推出了AR開發平台ARKit,但一直以來略顯低調。蘋果的AR布局已久,可謂“軟硬兼施”,還有一種放長線釣大魚的樣子。
醉翁之意不在酒,蘋果眼下在傳感器硬件上進行新嘗試,看中的卻是將AR應用程序和軟件生態帶向新的高度。在蘋果推動AR的三年時間裏,沒有“殺手級”應用出現。而激光雷達傳感器的進展,就是要望解決這個難題。
在iPad Pro激光雷達傳感器應用展示中,蘋果已經在努力展現其AR應用的強大。例如,其Apple Arcade Hot Lava遊戲,可以使用數據更快更准確地爲客廳建模以生成遊戲表面;有一個CAD應用程序,可以掃描房間的3D模型並查看其外觀;另一個演示可以准確確定手臂的運動範圍。
▲利用AR模擬生態系統