6月20日,CVPR 2021自動駕駛研討會(Workshop on Autonomous driving)揭曉了本年度谷歌無人駕駛公司Waymo開放數據集挑戰賽的最終結果。南洋理工大學的代表團隊在該項比賽中獲得了兩項最高獎項。
Waymo開放數據集挑戰賽
作爲全球自動駕駛公司王者,2020年3月,Waymo首次在CVPR自動駕駛研討會期間舉辦Waymo開放數據集挑戰賽,宗旨是以模型導向,以算法爲王。Waymo首席科學家兼項目負責人Drago Anguelov表示:“我們的數據集是有史以來規模最大、場景最豐富、最多樣化的自動駕駛數據集之一。”

來源:waymo
作爲自動駕駛領域中算法研發方面最著名的國際性大賽,本屆Waymo開放數據集挑戰賽旨在鼓勵對感知與行爲預測進行新的研究。爲此,Waymo開放了其自動駕駛車輛在25個城市收集的超過1000萬英裏、570個小時的自動駕駛道路數據,超10萬個城市真實場景。大賽吸引了包括清華、滴滴、賽靈思、伯克利、德克薩斯大學、南洋理工大學等在內的30余支學術界和産業界頂尖自動駕駛研發團隊的參與。
爲了解計算機視覺算法在解決自動駕駛環境感知問題方面的現狀,主辦方提出了兩個挑戰,准備了由Waymo和Argo-AI收集和注釋的大規模數據集。基于這些數據集定義了許多現實問題,鼓勵業界爲自動駕駛發明新的算法。

來源:waymo
Waymo開放數據集挑戰賽共設四個現場項目,包括實時2D檢測、實時3D檢測、動態預測及關聯預測。
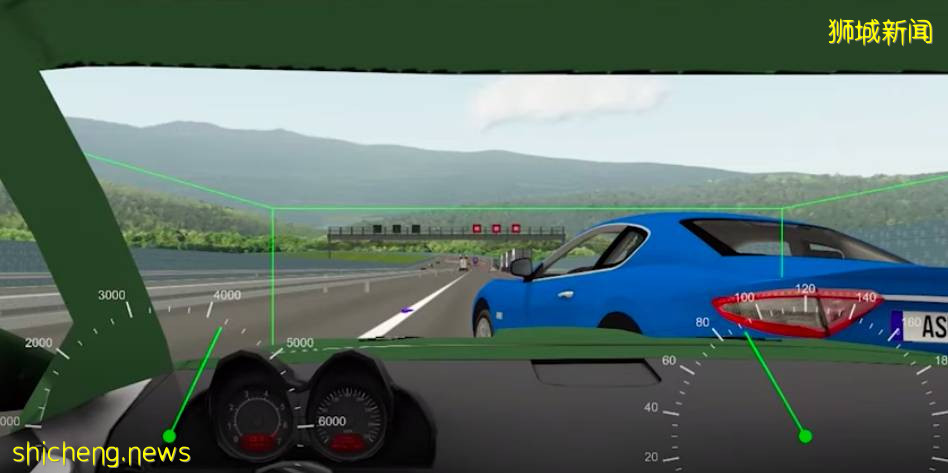
實時3D檢測:給定三幅激光雷達測距圖像和相關攝像頭圖像,爲場景中的對象生成一組3D直立框。
實時2D檢測:給定一組攝像頭圖像,爲場景中的對象生成一組2D框,有延遲要求。
運動預測挑戰:給定實體(agent)對應地圖上過去1秒的軌迹,在未來的8秒鍾內預測最多8個實體的位置。
交互預測挑戰:給定實體在對應地圖上過去1秒的軌迹,預測2個交互實體在未來8秒內的共同未來位置。
南大贏得兩項最高獎項

獲獎團隊,來源:NTU官網
在交互預測挑戰中,南洋理工大學是唯一的冠軍獲獎隊伍,力壓其他的實力參賽團隊。在運動預測挑戰賽中,南洋理工大學排名第二,僅次于清華大學。
南大團隊目前正尋求將其技術整合到 NTU-Volvo 全尺寸自動駕駛電動巴士中,並在自動駕駛汽車測試與研究卓越中心進行試驗。
來源:NTU官網
開發未來移動解決方案是南大 2025 戰略計劃的一部分,該計劃旨在通過研究解決技術對人類的影響。這些未來的移動技術是在南大智能校園開發和測試的,這是一個創新數字和技術支持解決方案的現場試驗台,支持更好的學習和生活體驗。
參考文獻:
1. “Twin win at Google’s Waymo autonomous driving competition” NTU Media Release;