原文鏈接:機器人學狀態估計、GVINS、FASTLIO2、語義SLAM!學習計劃啓動!
大家好,SLAM知識星球最近組織了第4波學習活動,學習計劃即將開始啓動!目前幾個學習小組已經組隊完畢,即將啓動學習計劃~主要學習內容如下
1、一起學習書籍《機器人學中的狀態估計》。計劃從頭到尾細讀該書,推導重要公式、對關鍵內容做適當的拓展。
2、一起學論文:語義SLAM。一起精讀重要的論文,討論研究思路和方法。
3、香港大學開源激光慣性算法FAST-LIO2。搞懂原理和代碼,最好能一起對源碼進行中文注釋。
4、香港科技大學開源GVINS。搞懂原理和代碼,最好能一起對源碼進行中文注釋。
以上學習小組的學習視頻會陸續提供給知識星球成員。
另外,前幾次知識星球的學習小組內容已經全部更新完畢!包括以下獨家系列視頻教程:
1、從零開始系統學習代碼調試(10講更新完畢)
2、從零開始系統學習G2O (8講更新完畢)
3、從零開始系統學習Ceres solver(6講更新完畢)
4、從零開始系統學習OpenCV(13講更新完畢)
5、從零開始系統學習點雲PCL (18講更新完畢)
6、死磕視覺SLAM十四講(22講更新完畢)
7、多傳感器融合LVI-SAM 快速入門(13講更新完畢)
8、多傳感器融合R3LIVE 快速入門(7講更新完畢)
9、視覺稠密SLAM-TANDEM 快速入門(4講更新完畢)
只要是「從零開始學習SLAM」知識星球有效期內的會員 都可以隨時觀看、學習(支持網頁版、手機APP),視頻已經都放在計算機視覺life小鵝通在線課程平台,只需要掃描下面二維碼即可學習!注意該權限需要單獨聯系助理開通,如會員無法觀看,請聯系 星球裏的小助手開通!
長按二維碼,領取限時限量30優惠券,加入學習交流,3天內無條件退款

注意,購買後務必加星球助理微信,進交流群,領取課程觀看權益!

什麽是SLAM?
SLAM是 Simultaneous Localization And Mapping的 縮寫,一般翻譯爲:同時定位與建圖、同時定位與地圖構建。
SLAM的典型過程是這樣的:當某種移動設備(如機器人/無人機、手機、汽車等)從一個未知環境裏的未知地點出發,在運動過程中通過傳感器(如激光雷達、攝像頭等)觀測定位自身在三維空間中的位置和姿態,再根據自身位置進行增量式的三維地圖構建,從而達到同時定位和地圖構建的目的。

SLAM技術在最近幾年發展迅猛,廣泛應用于增強現實感知、自動駕駛高精度定位、機器人自主導航、無人機智能飛行等前沿熱門領域。
01SLAM知識星球裏都有什麽?
大家好,在我們的機器人SLAM知識星球裏,很多剛入門的同學問的最多的問題我總結了一下,主要有:
- 機械/自動化/數學等非計算機專業能否轉SLAM?
- 導師不懂,但要我做SLAM方向,怎麽入門?
- 編程基礎差,數學不好,能否學習SLAM?
- 看完十四講,下面怎麽學習?
- 需要學哪些開源框架?怎麽學習呢?
- 編譯遇到很多問題,怎麽解決?
- 只有自己一個人學SLAM,沒人討論好痛苦,怎麽辦?
- 想要和小夥伴組隊系統的學習,有資源嗎?

這些問題我們知識星球裏都有回答過,「SLAM和3D視覺」星球裏也經常組織定期的直播,分享學習、求職、科研方面的經驗,SLAM的學習曆程不是一蹴而就的,需要科學的過程,也需要一個積極向上、經常討論交流的圈子,少走彎路,早就是優勢。

我們建立了全國最棒的SLAM和三維視覺交流社區,包括小白入門圖文/視頻教程、學習過程疑難點解答、每日最新論文/開源代碼/數據集分享、在線學習小組、筆試面試題、實習/校招/社招崗位推薦、星主直播交流等。
- 2018年創立、3800+會員、6500+主題分享、9500+問答評論、130+教學視頻
- 領域:機器人SLAM、三維視覺、自動駕駛、增強現實、無人機、圖像處理
- 直播:每月6/16/26日固定直播,涵蓋大佬分享、學習經驗、求職面試、實習曆程、行業內幕
- 教程:圖文視頻教程:涉及代碼調試、OpenCV、PCL、G2O、Ceres、十四講、LVISAM、R3LIVE
- 答疑:每日星主答疑、嘉賓答疑、星友互助答疑,搜索關鍵字幾乎所有問題都能找到答案
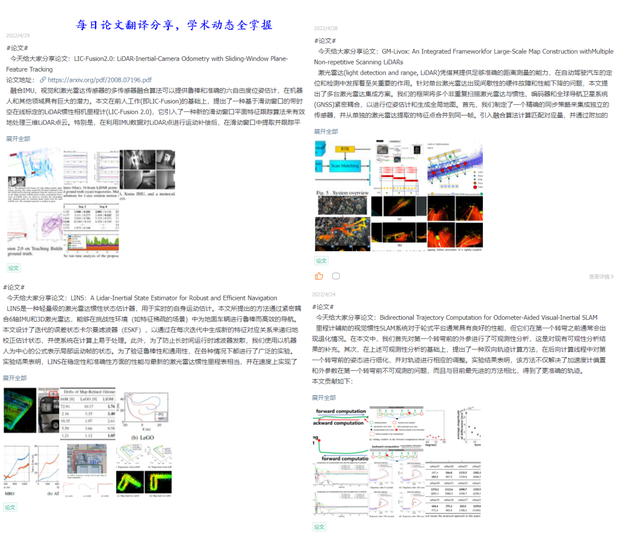
- 資訊:每日論文分享、行業資訊彙總、每周彙總、精華彙總
- 活動:學習小組、行業資源對接、會員激勵、有償招募助教/兼職
- 求職:經驗分享、內推職位、SLAM面試題、筆試練習
- ……
「從零開始學習SLAM」知識星球內容非常豐富,下面是內容示例:
如果你想學習,星球裏有大量的獨家視頻課程和優質分享!
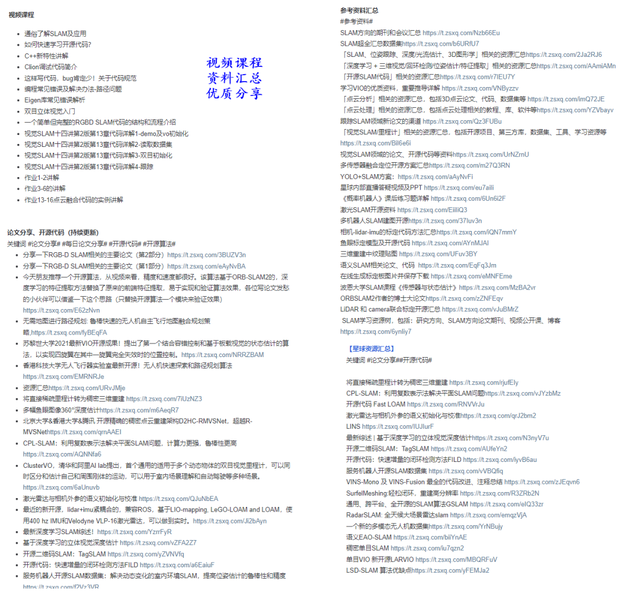
如果你想和高手交流學習,可參與直播互動,學習經驗,可看回放(部分)!

如果你關心學術動態,每日論文分享和翻譯正好適合你!
如果你關心行業動態,來看每日行業新聞彙總!

如果你很忙,每周看我們的精華彙總即可:
如果你想找工作,求職,有大量的面試題,筆試題,就業機會,還有求職經驗分享直播~
還有還有很多等你來探索!
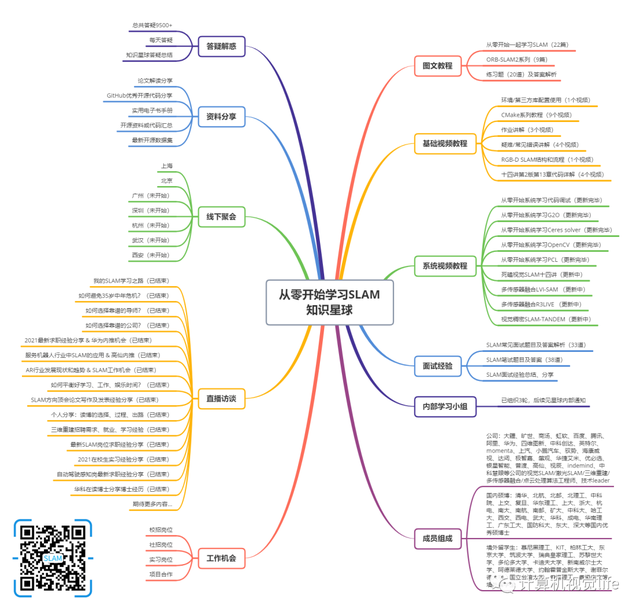
SLAM星球內容樹形圖
長按二維碼,領取限時限量30優惠券,加入學習交流,3天內無條件退款
注意,購買後務必加星球助理微信,進交流群,領取星球權益
02星球裏都是什麽人?
星球內嘉賓和學員都非常優秀上進,早期加入的成員很多已經進入業界知名公司、高校研究機構開啓了精彩的人生。

目前星球成員主要來自:
公司:大疆、百度、騰訊、阿裏、華爲、字節跳動、京東、高德、美團、曠世、商湯、虹軟、雲從、依圖、智行者、地平線、Nvidia、四維圖新、中科創達、微軟、英特爾、momenta、上汽、小鵬汽車、蔚來汽車、馭勢、海康威視、達闼、極智嘉、擎朗、追覓、石頭、肇觀、華捷艾米、優必選、銀星智能、普渡、高仙、思岚、視辰、小米、OPPO、VIVO、奧比中光、速騰聚創、禾賽、Pico、indemind、中科慧眼、圖漾等公司的視覺SLAM/激光SLAM/三維重建/多傳感器融合/點雲處理算法工程師、技術leader。
國內碩博:清華、北航、北郵、北理工、北交大、中科院、上交、複旦、同濟、華東理工、上海大、上科大、中科大、合肥工大、浙大、杭電、南大、東南大學、南航、南郵、南理工、蘇大、中國礦大、山東大學、天津大學、南開、哈工大、大連理工、東北大學、西交、西工大、西電、武大、華科、電子科大、重慶大學、西南交大、華南理工、廣東工大、國防科大、湖南大學、鄭州大學、廈門大學、深圳大學等國內優秀碩博士。
留學生:慕尼黑工大、卡爾斯魯厄理工、波恩大學、斯圖加特大學、柏林工大、東京大學、築波大學、早稻田大學、瑞典皇家理工、蘇黎世大學、蘇黎世聯邦理工、倫敦大學、帝國理工學院、牛津大學、多倫多大學、卡迪夫大學、悉尼科技大學、新南威爾士大學、阿德萊德大學、約翰霍普金斯大學、加州大學、明尼蘇達大學、卡內基梅隆大學、斯坦福大學、麻省理工學院、賓夕法尼亞大學、新加坡國立大學、南洋理工大學、謝菲爾德大學、台灣大學、香港科技大學、香港理工、香港大學、澳門科技大學等境外留學生
03獨家系統學習教程
好消息!「從零開始學習SLAM」知識星球的學習小組內容已經全部更新完畢!包括以下獨家系列視頻教程:
1、從零開始系統學習代碼調試(10講更新完畢)
2、從零開始系統學習G2O (8講更新完畢)
3、從零開始系統學習Ceres solver(6講更新完畢)
4、從零開始系統學習OpenCV(13講更新完畢)
5、從零開始系統學習點雲PCL (18講更新完畢)
6、《死磕視覺SLAM十四講》(22講更新完畢)
7、《多傳感器融合LVI-SAM 快速入門》(13講更新完畢)
8、《多傳感器融合R3LIVE 快速入門》(7講更新完畢)
9、《視覺稠密SLAM-TANDEM 快速入門》(4講更新完畢)
10、《機器人學中的狀態估計》解讀 (即將開始)
11、《語義SLAM論文解讀》(即將開始)
12、激光慣性FASTLIO2原理代碼解讀(即將開始)
13、多傳感器融合GVINS 原理代碼解讀(即將開始)
部分具體內容如下

向下滑動查看

1、從零開始系統學習代碼調試(更新完畢)
第01講-孟新宇-CLion快捷鍵及基礎調試方法
第02講-王瑞凱-VSCode簡介及基礎調試方法
第03講-李博文-gdb的命令行調試基礎
第04講-劉文濤-clion的gdb調試-多進程多線程調試
第05講-王愛博-vscode高階調試
第06講-邢朝陽-clion高階調試
第07講-趙以恒-Ubuntu下編譯運行代碼報錯彙總問題及解決方法
第08講-奚月鋒_ubuntu下段錯誤産生的原因及解決辦法
第09講-張彤-debug的時候如何使用log來快速定位問題?重定向,分析解決方法,示例
第10講-宋治星-Visual Studio 菜單欄簡介及C++ 代碼基礎調試方法示例
2、從零開始系統學習G2O (更新完畢)
第01講-李陽-帶你學G2o論文
第02講-鍾灼-g2o在BA數據集應用的原理代碼講解
第03講-唐敏-g2o編譯以及頂點定義、g2o常見的錯誤及解決辦法
第04講-趙張桢-g2o中邊的定義方法
第05講-胡庭旭-使用g2o根據不同情況搭建圖模型的頂點和邊的技巧、內部求解器原理
第06講-李陽-g2o實現2D-SLAM和BA演示
第07講-張睿-g2o實現ICP及plane-SLAM
第08講-胡庭旭-g2o中動態頂點(待更新)
3、從零開始系統學習Ceres solver(更新完畢)
第01講-扶年-Ceres官方入門教程解讀修改封面
第02講-張占賓-Ceres求解直接法BA實現自動求導代碼講解
第03講-袁升-Ceres實現BA及單應矩陣代碼
第04講-張昊威-Ceres實現3d位姿圖優化例程
第05講-張昊威-Ceres實現2d位姿圖優化例程
第06講-薛宇軒-Ceres自動求導背後的原理及代碼實現機制
4、從零開始系統學習OpenCV(更新完畢)
第01次-張俊傑-OpenCV安裝工程配置、模塊介紹、不同版本切換方法
第02講-龔俊-OpenCV如何對像素進行操作
第03講-王偉-特征點檢測與提取-Harris角點,FAST,ORB,SURF等源碼分析
第04講-余唐健-用OpenCV進行相機標定
第05講-楊康康-圖像濾波,邊緣檢測,形態學操作,連通域,直方圖等
第06講-鄭曉豐-OpenCV顯示與繪制:特征點,圖像標注,線段等
第07講-甘傑雄-OpenCV的調試方法gdb,imagewatch
第08講-郜澤霖-H,E,F矩陣計算-recoverPose-triangulatePoini
第09講-甘傑雄-補充-OpenCV的調試方法-gdb-imagewatch-交互調試
第10講-李佳霖-雙目匹配stereoRectify
第11講-奚月鋒-求解solvePnP、solvePnPRansac
第12講-王體-Deep Neural Network module
第13講-徐傑-跟蹤
5、從零開始系統學習點雲PCL (更新完畢)
第01講-付冬高-PCL簡介、安裝編譯及工程配置、基本模塊介紹、使用過程中的注意
第02講-汪壽安-PCL基礎-命名規範、設計結構、點類型,增加自己定義點類型,編寫新的類
第03講-扶年-輸入輸出-IO設備及概念、PCD文件讀寫點雲示例、數據格式轉換、用Kinect2取點雲數據
第04講-趙以恒-kdtree和八叉樹介紹及應用示例
第05講-姜海洋-Ransac和點雲可視化
第06講-蘇雲征-隨機采樣一致性
第07講-薛宇軒-RangeImage的相關類、從點雲創建深度圖像並提取邊界、點雲到深度圖
第08講-張占賓-NARF、SIFT、Harris關鍵點,基于對應點分類的位置識別
第09講-譚博元-點雲濾波方案及filters模塊,雙邊濾波
第10講-汪壽安_實例代碼運行_點雲特征描述與提取
第11講-趙以恒-點雲特征描述與提取概念-點雲法向量、PFH、FPFH、VFH
第12講-付東高-配准基礎_ICP使用_匹配多幅點雲
第13講-蘇雲征-NDT相關及平面分割、圓柱分割和地面分割,結果演示代碼浏覽
第14講-蘇雲征-NDT分割原理推導-區域生長
第15講-譚博元-VFH描述子聚類識別與位姿估計
第16講-張占賓-運動對象分割與配准算法實現
第17講-姜海洋-PCL實現ORB-SLAM2稠密點雲建圖
第18講-薛宇軒-B樣條曲線與曲面重建
04星主私密直播
每月6、16、26日星主都會做私密/公開直播。有時候星主分享,有時候是邀請行業內專家來做分享。爲什麽做私密直播?主要有以下因素
- 星球裏臥虎藏龍;幫助星友深度鏈接
- 分享更多元的知識:大佬分享前沿技術、學習經驗、面試實習經驗、行業趨勢/內幕…
- 促進星友之間更多的合作機會:學習、求職、招聘、項目合作等…
最近幾個月分享內容如下:
注意:部分早期私密直播沒有回放哦,2022年2月之後直播大部分有回放視頻,越早加入越劃算!
每次直播都會提前在星球內部及內部微信群通知,請留意,不要錯過!
05如何加入星球?
知識星球需付費加入,價格隨人數增加逐漸上漲,因此越早加入越優惠。有效期一年(從加入時間開始往後一年有效,到期仍可查看之前所有內容,查看新內容需續費),平時忙也沒關系,有空可以反複看。
時間不等人,萬事早爲先。學習切忌單打獨鬥,一個良好的學習圈子能夠幫助你快速入門,交流討論才能少走彎路,快速進步!加入SLAM學習星球,把握時代的風口,和國內外優秀的SLAM研究者一起交流進步
長按二維碼,領取限時限量30優惠券,加入學習交流,3天內無條件退款
注意,購買後務必加星球助理微信,進交流群,領取星球權益!
獨家重磅課程官網:cvlife.net