編者按
國大計算機系教務長 David Hsu 教授和 Lee Wee Sun 教授榮獲2021年機器人領域知名會議 RSS(Robotics: Science and System)時間檢驗獎 (Test of Time),讓我們恭喜兩位教授!
RSS 會議介紹
RSS(Robotics: Science and System)是機器人領域的知名會議。與其他領域動辄接收上千篇論文的頂會不同,RSS每年接收的論文只有幾十篇,錄取難度比較高。從方向來看,RSS 接收的論文更偏重算法和數學,今年的建議投稿方向包括機制設計、機器人學習、控制與動力學、人機互動、機器感知、多機器人系統和醫療保健機器人等。
受疫情影響,今年的 RSS 于7月12日至16日在線上舉辦,分爲 Keynote、Workshop、Tutorial 等多個環節。在Workshop、Tutorial 等環節,來自多個研究機構的學者探討了機器人視覺學習與推理、GPU 加速的機器人學習與控制等話題。感興趣的同學可以在 Youtube 等平台找到相關視頻。
獲獎內容
本屆 RSS 會議的時間檢驗獎頒給了 2008 年發表的一篇論文《SARSOP: Efficient Point-Based POMDP Planning by Approximating Optimally Reachable Belief Spaces 》,論文作者爲 Hanna Kurniawati、 David Hsu 和 Lee Wee Sun,他們都來自新加坡國立大學。論文發表時 Hanna Kurniawati 在兩位國大教授的指導下進行博士後研究,目前在澳大利亞國立大學擔任副教授。
不確定和動態環境中的運動規劃是自主機器人的基礎能力。POMDPs(partially observable Markov decision processes )算法爲解決此類問題提供了一個標准的數學框架,但由于其計算複雜度過高而經常在機器人技術中避免使用。

從左至右:David Hsu、Lee Wee Sun和Hanna Kurniawati、
在本文中,研究者旨在爲常見的機器人任務創建實用的 POMDP 算法和軟件,爲此他們提出了一種基于點的 POMDP 算法 SARSOP ,該算法利用最佳可達信念空間的概念來提升計算效率。
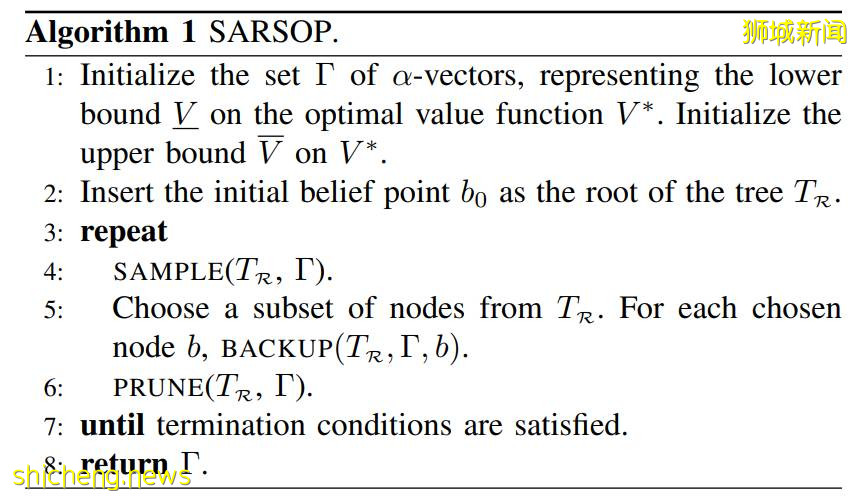
SARSOP算法
在模擬中,研究者成功地將該算法應用于一系列常見的機器人任務,比如沿海導航、抓取、移動機器人探索和目標追蹤等,所有這些任務都被建模爲具有大量狀態的 POMDP。他們發現在大多數任務實例中,該算法顯著優于當前最快的基于點的算法之一。
多名華人、華裔學者獲獎
除了獲得時間檢驗獎的兩名華裔學者外,還有不少華人、華裔學者榮獲各大獎項。
最佳論文獎
論文:TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments
該論文的第一作者 Chao Cao 本科畢業于香港大學,目前在卡內基梅隆大學讀博,研究興趣主要集中在機器人導航和運動規劃。除了日常科研之外,他還在領導 DARPA 地下城市挑戰賽 Team Explorer 競賽的規劃工作。此外,Hongbiao Zhu 和 Ji Zhang 也都是在CMU進行研究的華人學者。
最佳論文入圍
除了最佳論文獎外,本屆 RSS 會議還有三篇論文入圍了該獎項,每篇論文的第一作者都是華人或華裔學者。
論文 1:Optimal Pose and Shape Estimation for Category-level 3D Object Perception
論文 2:Moving sidewinding forward: optimizing contact patterns for limbless robots via geometric mechanics
論文 3:Toward Certifiable Motion Planning for Medical Steerable Needles
傑出審稿人獎
本屆 RSS 會議的傑出審稿人獎頒給了美國東北大學 Khoury 計算機科學學院的助理教授 Lawson Wong。他是該校通用機器人和人工智能實驗室(GRAIL)的負責人,致力于學習、表示、估計和使用自主機器人發現可能有用的關于世界的知識。

讓我們恭喜獲獎的國大教授以及其他學者們!期待他們以後可以將研究成果投入實踐,讓機器人領域繼續大步前進!
